Factors for classifying types of excavators. Classification and design diagrams of excavators Application and significance of excavators
Excavator called an earthmoving machine designed for the development (digging and moving) of soil, light rocks in a massif or rocks in a crushed state.
Excavators are used to perform more than half of the excavation work in the construction of industrial and civil buildings and structures, roads and railways, airfields, hydraulic systems and oil pipelines, in quarries for the extraction of building materials and minerals. With their help, pits, trenches, channels are opened, as well as excavations and embankments are developed and slopes and walls are finished.
In the road troops, excavators are the main earth-moving machine, they are used independently and as part of sets and complexes of earth-moving and transport vehicles for the construction and restoration of the roadbed, the construction of embankments and the construction of excavations, when performing barrier, quarry and loading and unloading operations, for engineering equipment of areas, participate in the work of traffic support units.
The working process of excavators consists of separating the soil from the massif - digging, transporting the soil to the unloading site, unloading and returning the working body to the position for new digging.
All excavators, depending on the time of the working process, are divided into two large groups: continuous operation - multi-bucket; periodic (cyclic) action - single-bucket.
Multi-bucket excavators perform both operations (digging soil and moving it) simultaneously; single-bucket - sequentially, interrupting digging while moving the soil. Thus, the working time of the machine, during which the soil is removed, and the productivity of multi-bucket excavators is higher than that of single-bucket excavators. The use of multi-bucket excavators is limited by their design features. They are mainly used for digging trenches and extracting non-metallic materials in quarries with homogeneous soils without stone inclusions.
Single-bucket excavators are universal and have a wider range of applications:
used for developing soils both above and below the level of the excavator installation site;
used for excavation, loading and unloading and other types of work, for which they are equipped with several types of replaceable working equipment;
used for the development of soils of categories I-II without preliminary loosening of the face, soils of categories III-IV, including frozen and rocky soils, with preliminary loosening of the face by explosion or with the help of rippers;
used in cramped conditions, when developing soil under water, unloading it into vehicles or into a dump.
The industry produces various types of excavators, which are classified according to the method of movement, the type of main engine used, the drive mechanisms, the type of power transmission, the type of control system, the design of the running gear, the angle of rotation of the turntable, and the design of the working equipment.
By method of movement Excavators are either land-based or floating. Land excavators are divided into self-propelled and moved by a tractor on a tow or trailer, both without disassembly and with dismantling of individual elements.
By type of main (primary) engine used Modern excavators are available with diesel or electric engines. Diesel engines are used on excavators, which have to be frequently moved from place to place (in the construction of roads and railways, the construction of oil pipelines, etc.). Electric motors are used on excavators that constantly work in one place (for example, in quarries). They are simpler and cheaper to operate.
By driving mechanisms A distinction is made between single-engine excavators, in which all working mechanisms are driven by one or more engines operating on one shaft, and multi-engine excavators, in which each working mechanism is driven by a separate (individual) engine.
By type of power transmission movement from the engine to the working mechanisms, construction excavators are divided into mechanical, hydraulic and electrical.
In mechanical excavators, motion is transmitted directly from the prime mover to all mechanisms using shafts, gears, worm pairs, chains and other mechanical transmissions (mechanical transmission).
In hydraulic excavators, the role of transmission is performed by a hydraulic pump (one or more), pipelines and hydraulic motors (hydraulic motors or hydraulic cylinders).
The electric type of power transmission differs from the hydraulic type in the type of power mechanisms - an electric generator, power networks, an electric motor (one or more).
By type of control system There are excavators with lever-mechanical, pneumatic, hydraulic, electric and combined (electro-pneumatic, electro-hydraulic) control. Lever-mechanical control, due to a large number of shortcomings, has been replaced by pneumatic or hydraulic control on most machines. Pneumatic control is installed on machines with a single-engine drive and mechanical transmission. Hydraulic and electrical control are used for the corresponding types of drive.
Based on the design of the running gear, land excavators are divided into tracked, pneumatic, and walking (the latter are used only in single-bucket excavators).
The running device receives and transmits to the base (soil) loads from the mass of the machine and loads arising during operation, and also ensures the movement of the excavator.
The running gear of excavators is of the following types: G– tracked with the minimum permissible supporting surface of the tracks; GU– tracked (widened) with an increased support surface of the tracks, designed for work on soils with low bearing capacity; P– pneumatic wheel, which allows you to increase the mobility of the excavator, facilitate and speed up its transfer under its own power from one object to another; SSH– a special automobile-type chassis, different from the type P the fact that in addition to the engine installed on the rotating part of the excavator, a more powerful engine is installed on the chassis, ensuring the movement of the excavator at high speed; running gear type SSH has a strong and low special frame, different in design from the chassis frame of a truck; A– truck chassis; Tr– tractor (usually pneumatic wheeled tractors are used); Etc– trailed.
Depending on the angle of rotation of the turntable in the horizontal plane, excavators are called full-rotary or part-rotary.
The rotating part of a full-rotary excavator can rotate around a vertical axis at an unlimited angle. For machines of this type, the engine and main working mechanisms are installed on a rotating platform, and the working equipment is also strengthened.
Only small tractor-based excavators are made part-rotary. These excavators do not have a rotating platform, and the working equipment is strengthened using a rotating column directly on the running device, relative to which it rotates at a limited angle (180-270 0).
Depending on the design of working equipment Single-bucket excavators come with flexible, rigid suspension and a telescopic boom.
The boom, and sometimes the working element (for example, a bucket) in flexible-suspension excavators, is suspended on ropes that are driven. The boom and other elements of the working equipment of an excavator with a rigid suspension are pivotally connected to each other and driven by hydraulic cylinders. Excavators with a telescopic boom include excavators in which the working process is accompanied by extension and retraction of the boom.
In addition to the listed classification characteristics, excavators differ from each other in design, purpose, size and power. Single-bucket excavators, depending on the purpose or type of work performed, are divided into construction, quarry, stripping, and special.
Construction Excavators with buckets with a capacity of up to 4 m 3 are intended for excavation and loading and unloading work.
Career Excavators are intended for work in ore, coal and other quarries.
Overburden straight shovel excavators and walking draglines with buckets with a capacity of 25-160 m 3 are used in open-pit mines and large construction sites (quarries) to remove overburden to the dump.
Special excavators (tunnel, peat, etc.) are designed for use in certain specific conditions.
The indexation (labeling) of single-bucket excavators in force in our country reflects their main characteristics. Indexing of excavators is based on the size group of machines.
The stability of the machines and the ability to effectively use buckets of various capacities at the appropriate boom reach, depth or digging height determine the size group of excavators.
Bucket capacities are given for guidance only, as for a given excavator they may differ by two or more times, depending on the category of soil being developed.
The indexing system for single-bucket universal excavators provides the following index structure (Fig. 6.1). The excavator index consists of letter and number groups.
The letter group “EO” means single-bucket excavator. For military excavators, the left letter part of the index has the letter B (EOV - single-bucket military excavator).
A digital group means (in the order of their arrangement): size group; type of running gear; execution of working equipment; model serial number.
The letters (A, B, ...) after the numbers indicate the next modernization of this model, as well as its special climatic version (HL - northern; T - tropical; TV - for the humid tropics).
For example, the index EO-4125ХЛ designates a single-bucket, full-rotary, universal excavator, size group IV (main bucket capacity 0.65 m 3), crawler-mounted, with rigid suspension of working equipment (hydraulic), model 5, northern version.
Along with the one discussed, there may be an indexation that includes a letter designation of the type of fixed part and a digital group indicating the weight of the excavator. For example, the index EK-17 denotes a single-bucket excavator on pneumatic wheels weighing 17 tons.
GENERAL INFORMATION
GENERAL INFORMATION ABOUT EXCAVATORS
PART ONE
Chapter I
§ 1
Classification and main parts of excavators
Excavators are earth-moving machines designed to dig and move soil. All excavators, depending on the use of working time for actually digging the soil, are divided into two large groups: continuous action - multi-bucket and periodic (cyclic) action - single-bucket. Multi-bucket excavators perform both operations - digging the soil and moving it - simultaneously; single-bucket operations are performed sequentially, interrupting digging while the soil is moving. Thus, the working time of the machine, during which the soil is removed, and the productivity of multi-bucket excavators is higher than that of single-bucket excavators. Despite this, single-bucket excavators are more widespread due to their versatility, i.e. the ability to use them both for excavation and for loading and unloading work in the heaviest soils, including rocky (with preliminary blasting). The use of multi-bucket excavators is limited: they are mainly used for digging trenches and extracting non-metallic materials in quarries with homogeneous soils without stone inclusions.
According to the method of movement, excavators can be land-based or floating.
Based on the design of the running gear, land excavators are divided into tracked, wheeled and walking (the latter is used only in single-bucket excavators). *
Depending on the type of main (primary) engine used, modern excavators are either diesel or electric. The choice of engine is determined by the conditions in which the excavator will operate. Thus, diesel engines are used on excavators where the machine needs to be transported from place to place relatively often, for example, in the construction of oil and gas pipelines, railways and highways, civil engineering, etc.
On excavators that constantly work in one place, for example in quarries for the extraction of non-metallic materials, it is advantageous to use electric motors, which are simpler and cheaper to operate.
Based on the drive mechanisms, a distinction is made between single-engine excavators, in which all the working mechanisms are driven by one or more engines operating on one shaft, and multi-engine excavators, in which the working mechanisms are driven by several engines operating independently of each other.
In the USSR, all construction single-bucket excavators with a mechanical drive are produced as single-engine ones. The multi-motor drive is used on construction hydraulic excavators.
Based on the type of power transmission from the engine to the working mechanisms, construction excavators are divided into mechanical and hydraulic.
In mechanical excavators, motion is transmitted directly from the prime mover to all mechanisms using shafts, gears, worm pairs, chains and other mechanical transmissions (mechanical transmission).
In hydraulic excavators, the role of transmission is performed by a hydraulic pump (one or more), pipelines and hydraulic motors (hydraulic motors or hydraulic cylinders). Working fluid circulates in the pipelines, transmitting energy from pumps to hydraulic motors that set the working mechanisms in motion.
In addition to the listed classification features, the excavators of each group differ from each other in purpose, size and power.
Single-bucket excavators are divided into three main groups according to their intended purpose: universal construction excavators, designed for excavation and loading and unloading work in construction; quarry - for "work in quarries for the development of ore and coal deposits, as well as rocks; overburden - for the development of minerals (coal, ore) in an open way. The last group also includes powerful walking dragline excavators used in mining operations for transferring the upper layers of rocks into mined-out space, as well as in the construction of large hydraulic structures.
In addition to these main groups, they also produce special excavators designed for use in certain specific conditions: underground - for underground mining of minerals with a large thickness of the seam, tunnel - for loading blasted rock during tunneling, peat - for peat extraction, etc.
This textbook describes the most common (weighing up to 22 tons) single-bucket universal construction excavators produced by the domestic industry.
A single-bucket excavator (Fig. 1) consists of the following main parts: running gear 1U turning part and working equipment.
The running device receives and transmits to the base (soil) the loads from the mass of the machine and the loads that arise during operation, and also ensures the movement of the excavator.
The running gear of excavators is of the following types:
G - tracked with the minimum permissible supporting surface of the tracks;
GU - tracked with an increased support surface of the tracks, designed for work on soils with low bearing capacity;
P-"pneumatic wheel, which allows you to increase the mobility of the excavator, facilitate and speed up its transfer under its own power from one construction site to another;
Sh - a special automobile-type chassis, which differs from type P in that, in addition to the engine installed on the rotating part of the excavator, a more powerful engine is installed on the chassis, ensuring the movement of the excavator at high speed; the Ш type running gear has a strong and low special frame, which differs in design from the chassis frame of a truck;
A - truck chassis;
Tr - tractor (usually pneumatic wheeled tractors are used).
The rotating part consists of a rotating platform 2 with mechanisms and power equipment and working equipment 3.
The turntable rests through a special roller slewing device on the frame of the running device and can be rotated relative to it in a horizontal plane. The same turntable can be installed on various types of undercarriages.
Depending on the angle of rotation of the turntable in the horizontal plane, excavators are called full-rotary or part-rotary.
The rotating part of a full-rotary excavator can rotate around a vertical axis at an unlimited angle. For machines of this type (Fig. 2, a), the engine and main working mechanisms are installed on a rotating platform, as well as working equipment.
Only small tractor-based excavators are made part-rotary (Fig. 2, 6).
These excavators do not have a rotating platform, and the working equipment is mounted using a rotating column directly on the running device, relative to which it rotates at a limited angle.
1 Scheme of a single-bucket excavator:
1 - running device,
2 - rotating platform,
3 - working equipment
2 Full-rotary excavator E-652B with a mechanical drive on a crawler track with a flexible suspension of working equipment (a) and a part-rotary excavator EO-2621A with a hydraulic drive based on a tractor with a rigid suspension of working equipment (6)
Working equipment is a complex of excavator components that contains a working element (for example, a bucket, hook or grab, with which they dig soil, lift loads, grab loose and lump materials) and ensure its operation in the excavator work area.
The main working part of the excavator - the bucket - is designed for digging, holding while moving and unloading soil or other material. Digging is the simultaneous cutting of soil and filling a bucket with it. The cut portion of the soil is called shavings (Fig. 3).
Depending on the design of the working equipment, excavators come with flexible suspension, rigid and telescopic booms. In excavators with flexible suspension, the boom, and sometimes the working element (for example, a bucket), is suspended on ropes that are driven.
In excavators with rigid suspension, the boom and other elements of the working equipment are pivotally connected to each other and driven by hydraulic cylinders.
Excavators-levelers are produced with a telescopic boom, in which the extension and retraction of the boom are working movements.
A universal construction excavator usually has several types of working equipment that it can use depending on operating conditions. These types of working equipment can be easily replaced by one another, which is why they are called interchangeable.
Working equipment with a rigid suspension (articulated-lever) and with a telescopic boom is used only on hydraulic excavators.
The working body is also attached to the working equipment with a flexible or rigid connection. In Fig. Figure 4 shows various fastenings of the working body for different types of working equipment with a flexible (rope) suspension.
The working process of a single-bucket excavator consists of a working cycle, i.e., development and movement of soil, and movement of the excavator to the face, after it becomes inconvenient or impossible to continue further development of the soil from the excavator’s parking lot. No work is done while the excavator is moving, so the time spent moving should be reduced as much as possible.
The work cycle of an excavator consists of the following operations:
1. The actual digging of the soil (cutting off the soil and filling the bucket with it).
2. Removing the bucket with soil from the face to ensure the possibility of unhindered rotation of the platform.
3. Moving a bucket filled with soil to the unloading site, for which either the platform with working equipment (for full-rotary machines) or only the working equipment (for part-rotary machines) is turned.
4. Unloading soil from a bucket into a dump or into a vehicle.
5. Moving the bucket (rotating the platform) towards the face.
6. Lower the bucket to prepare for the next digging operation.
Until the end of the 60s, our country mainly produced full-rotary excavators with a mechanical drive and flexible suspension of working equipment. In the Ninth Five-Year Plan (1970-1975), the production of hydraulic excavators with rigid suspension of working equipment developed rapidly (Fig. 5-7). This expansion in the production of hydraulic excavators is determined by a number of their design, technological and economic advantages compared to mechanically driven excavators.
Excavator classification
Excavators are earth-moving machines designed to dig and move soil. All excavators are divided into two large groups: continuous action - multi-bucket and periodic (cyclic) action - single-bucket.
Continuous excavators perform both operations - digging the soil and moving it - simultaneously; Batch excavators perform these operations sequentially, interrupting digging while the soil is moving. Thus, the working time of the machine during which the soil is selected is longer for continuous excavators and their productivity is higher than the productivity of periodic excavators. Despite this, single-bucket excavators are more widespread, the advantage of which lies in their versatility, i.e., the possibility of use in both excavation and loading and unloading operations and in any of the heaviest soils, including rocky (with preliminary blasting), soils . Multi-bucket excavators are used mainly for digging trenches and extracting non-metallic materials in quarries in homogeneous soils that do not have stone inclusions.
Both single-bucket and multi-bucket excavators are available on land and floating.
Land excavators have tracked, pneumatic wheels and walking (the latter is used only in single-bucket excavators) running equipment.
Excavator mechanisms are driven by diesel, carburetor, steam or electric engines. The vast majority of modern excavators are equipped with diesel and electric engines as the most economical ones. Carburetor engines are used less frequently.
The choice of engine is determined by the conditions in which the excavator will operate. So, on excavators working on the construction of railways and highways, that is, where the machine needs to be transported from place to place relatively often, diesel engines are used. On excavators that constantly work in the same place, for example in quarries for the extraction of non-metallic materials, coal mines, etc., it is advantageous to use electric motors, since electricity is the cheapest form of energy. In addition, maintenance is simplified and there is no need to constantly supply the machine with fuel.
Therefore, diesel engines are often installed on excavators with buckets with a capacity of up to 3 m3, and electric motors are installed on larger excavators.
If all the mechanisms of the excavator are driven by one engine, such a drive is called a single-engine drive. If each mechanism (or some of the mechanisms) in an excavator is driven by a separate motor (usually electric), such a drive is called a multi-motor drive.
In the USSR, single-bucket excavators with a single-engine drive were manufactured with buckets with a capacity of up to 2.5-3 m3, and abroad - up to 4-4.5 m3. Excavators are currently being prepared for production
with a diesel-electric multi-engine drive, on which buckets with a capacity of 1.6 m3 (E-1602) are installed. In addition, the production of excavators with a multi-engine hydraulic drive has begun, where buckets with a capacity of 0.25 m3 are used (E-2513 and E-2514), and the production of hydraulic excavators with a bucket with a capacity of 0.4-0.5 m3 is being prepared.
The spread of multi-motor drives is explained in particular by the fact that excavator mechanisms are made in the form of separate units, which can easily be installed during machine assembly and replaced during their repair (with the aggregate repair method). In addition, this design allows the use of identical or almost identical (unified) components on different machines, which will make it possible to establish large-scale specialized production of them and reduce the range of spare parts.
To transmit motion from the engine to the working mechanisms, the following types of drive are used:
– mechanical, when movement is transmitted using shafts, gears, worm pairs, chain drives;
– hydraulic volumetric, where the drive role is performed by a hydraulic pump (one or more), oil lines and hydraulic motors (or hydraulic cylinders);
– fluid circulates in the oil pipelines, transmitting energy from the pumps to hydraulic motors (or hydraulic cylinders) that set the working mechanisms in motion; this method is based on the property of a liquid not to be compressed;
– hydrodynamic, where turbo couplings or turbo transformers are used to transmit energy; it is usually used in combination with a mechanical one for smooth operation of mechanisms and automatic control of movement speed depending on the size of the load (as the load increases, the speed of movement of the working mechanisms decreases and vice versa);
– electric, used on excavators with a multi-motor drive in combination with a mechanical one; this drive allows the operator to adjust the speed of movement of the excavator mechanisms at will, automatically change the speed depending on the loads, and also combine working movements;
– mixed, consisting of two types of drives, for example mechanical and electrical.
A mechanical drive is the most common, so its presence on an excavator is not indicated in any way in the name of the machine, but usually only the type of engine is indicated, for example, a diesel single-bucket excavator with a bucket with a capacity of 0.5 m3. If a different type of drive is used, then this is indicated in the name of the excavator, for example, a diesel-electric excavator, that is, an excavator with diesel power equipment and an electric drive.
All of the above applies to both intermittent (single-bucket) excavators and continuous (multi-bucket) excavators.
Thus, excavators distinguish:
1) by method of movement (floating and land);
2) by type of power equipment (diesel, carburetor, electric or steam engine);
3) by the number of engines (single-engine, multi-engine);
4) by type of drive (mechanical, hydraulic volumetric, hydrodynamic, electric, mixed);
5) by type of running equipment of land excavators (tracked, pneumatic-wheeled).
In addition to the listed characteristics in the classification, each of the groups of excavators is distinguished by smaller characteristics - size, power, purpose.
Single-bucket excavators are divided according to their purpose into three main groups: – construction, with buckets with a capacity of up to 3 m3, intended for excavation and loading and unloading work in construction;
– quarry, with buckets with a capacity of 2 to 8 m3, designed for work in quarries for the development of ore and coal deposits, as well as rocks;
– overburden, with buckets with a capacity of over 6 m3, intended in particular for the development of the upper layers of rocks (overburden) covering layers of minerals (coal, ore).
Overburden excavators are distinguished by elongated working equipment, which makes it possible to dump soil over a long distance from the excavation site. This group of machines also includes powerful walking excavators - draglines, used in mining operations to transfer the upper layers of rock into mined-out space, as well as in large hydraulic engineering constructions.
Single-bucket excavators should be distinguished by their use with different types of working equipment.
Universal excavators are machines that have at least four types of replaceable working equipment. Construction excavators are usually produced as universal ones, and one type of working equipment can be replaced by another during operation.
Excavators that have only one type of working equipment are called special. As a rule, they are produced with buckets with a capacity of over 6 m3, however, excavators with buckets of smaller capacity (for example, underground) can also be special.
This book describes single-bucket construction land excavators produced by the domestic industry, full-rotary and part-rotary.

Rice. 1. Diagram of a single-bucket excavator:
1 - running equipment, 2 - turntable,
An excavator is a machine used for mechanical extraction of non-solid or crushed rocks (Fig. 2).
Along with separating part of the rock from the massif, the excavator moves the mined rock a certain distance to the transport, or to the dump, if the mined rock is dumped into a dump on site (when digging pits, when storing clay in cones or ridges).
The construction of the first single-bucket excavator dates back to 1836. Somewhat later, in 1860, a multi-bucket excavator was designed.
In pre-revolutionary Russia, the first single-bucket excavator appeared much later, in 1900. A small number of such excavators were produced for the development of sand quarries of the railway department. At that time, we did not manufacture multi-bucket excavators at all.
In the Soviet Union, excavator construction received powerful development.
According to the method of action and the location of the working implement, excavators are divided into the following main classes: single-bucket, cable-type, multi-bucket.
According to the method of movement in working condition, they are divided into excavators with rail and crawler tracks.
In recent years, the heavy engineering industry has begun to produce heavy-duty single-bucket excavators that move in working condition using a walking mechanism.
Multi-bucket excavators are also built as floating ones (so-called dredgers) for work on deepening rivers, canals and other bodies of water. One of the varieties of such dredgers is dredges, used in the gold mining industry.

Rice. 2. Single-bucket crawler excavator.
Excavators are powered by direct or alternating current electric motors, steam engines or internal combustion engines.
TO Category: - Operation of excavators
Main types of working equipment, parameters and indexing of construction excavators. Productivity and ways to improve it. Machines and equipment for frozen soils. The use of machines with traditional bodies for the development of frozen soils. Types of special machines.
General classification of single-bucket excavators (purpose, design, work processes, technological capabilities, performance, scope of application). Forward and backhoe, dragline, grab
 Single-bucket excavators are positional cyclic earth-moving machines equipped with a bucket working body. Duty cycle O.E. consists of sequential operations of digging soil, moving it in a bucket to the dumping site, unloading the bucket with dumping soil into a dump or vehicle, and returning the bucket to the position where the next working cycle begins. This is called excavation. After working off the face element, the excavator is moved to a new position. O.E.classify:
Single-bucket excavators are positional cyclic earth-moving machines equipped with a bucket working body. Duty cycle O.E. consists of sequential operations of digging soil, moving it in a bucket to the dumping site, unloading the bucket with dumping soil into a dump or vehicle, and returning the bucket to the position where the next working cycle begins. This is called excavation. After working off the face element, the excavator is moved to a new position. O.E.classify:
1-by purpose: construction, construction and quarry, quarry, stripping, tunnel, mine;
2-by type of working equipment: forward and backhoe, dragline, grab, planner;
3-according to the type of working equipment: rope, hydraulic
4 types of running devices: pneumatic wheels (car and tractor bases), caterpillar, walking;
5-possible rotation of the rotating part: full-rotary and part-rotary;
6- by the number of installed engines: single- and multi-engine.
O.E. They may have crane, piling, compacting and other replaceable equipment. Those with one type of working equipment are special, and those equipped with interchangeable types of working equipment are universal.
Construction forwarders are designed to develop soil up to category IV without preliminary loosening, frozen and rocky after loosening. Hydraulic excavators are used in 80% of total production.
The main parameter of an object is its mass. Depending on their mass, they are divided into size groups.
Size groups are characterized by a set of basic parameters:
1) - power of the power plant;
2) - bucket capacity;
3) - force on its teeth;
4) - dimensions of the working area;
5) - duration of the working cycle;
6) - movement speed;
7) - rotation speed of the turntable;
8) - surmountable slopes;
9) - specific pressure on the ground;
11) - overall dimensions and others.
| size group | mass of univ-x O.E., t | |
| O.E. | over | before |
| - 6,3 | 6,3 |
Indexes. O.E. – EO-0000:
1 figure – size group;
2 digit – type of undercarriage (1. tracked, 2. tracked with an increased supporting surface, 3. pneumatic wheels, 4. special automobile-type chassis, 5. truck chassis, 6. tractor-based);
3 digit type of suspension of working equipment (1 and 2 – with flexible and rigid suspension, 3 – telescopic working equipment);
4 digit – excavator model number.
For example EO-4123:
Single-bucket excavator, construction, universal, 4 size groups with caterpillar undercarriage, with an increased supporting surface, rigid suspension of working equipment, third model. The letters below indicate the next modernization and climate control.
Technical performance of O.E.:
 ,
,
where q is the bucket capacity;
Filling factor;
Soil loosening coefficient;
Working cycle duration;
Duration of one movement to a new position;
Number of working cycles at one position.
Operating performance:
![]() ,
,
where is the duration of the excavator operation period;
Time utilization factor (for single-shift work, Kv = 0.2-0.25).
The main working parts of hydraulic excavators are a backhoe bucket, a front shovel, a loader and a grab.
Replaceable working parts: bulldozer blades, single-tooth and multi-tooth rippers, hydraulic hammers, crane suspensions, various modifications of grabs and grippers, auger drills.
The excavator consists of a base part and working equipment.
Basic part: consists of a running trolley with a lower frame, a slewing bearing, a rotating platform with a pump-power unit, units of a hydraulic drive system and a driver's cabin.
 Working equipment - a backhoe includes a boom, a handle and a bucket connected in series by hinges. It is intended for developing soils mainly below the excavator parking level.
Working equipment - a backhoe includes a boom, a handle and a bucket connected in series by hinges. It is intended for developing soils mainly below the excavator parking level.
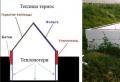
The working area of a full-rotary excavator is a part of the space limited by a toroidal surface, the radial section of which is called the axial longitudinal profile of the working area.
It is used to determine the working dimensions:
Hmax – maximum digging depth;
Rkcmax – digging radius at the excavator parking level;
Hвmax – unloading height.
 The working equipment - a straight shovel - for developing soil above the excavator parking level consists of a boom, a handle and a bucket. The boom is shorter than that of a backhoe. The boom is driven by two hydraulic cylinders, and the handle by one. With respect to the handle, buckets can be rotary or fixed. Such an excavator develops the soil by moving the bucket from below (from the excavator parking level) upward (to the upper edge of the face).
The working equipment - a straight shovel - for developing soil above the excavator parking level consists of a boom, a handle and a bucket. The boom is shorter than that of a backhoe. The boom is driven by two hydraulic cylinders, and the handle by one. With respect to the handle, buckets can be rotary or fixed. Such an excavator develops the soil by moving the bucket from below (from the excavator parking level) upward (to the upper edge of the face).
Working equipment –  grab - used for digging working pits, cleaning reservoirs and canals, for unloading and loading bulk materials. It consists of a two-jaw bucket mounted on the lower end of a rod suspended from the handle of the backhoe on two cylindrical hinges, allowing the bucket to take a vertical position. The jaws are opened by hydraulic cylinders.
grab - used for digging working pits, cleaning reservoirs and canals, for unloading and loading bulk materials. It consists of a two-jaw bucket mounted on the lower end of a rod suspended from the handle of the backhoe on two cylindrical hinges, allowing the bucket to take a vertical position. The jaws are opened by hydraulic cylinders.
To begin work, the bucket with its jaws open is lowered onto the material being grabbed, then they are closed. The ladle is inserted into the material and filled with it. Then it is lifted with a handle from the recess with the platform rotated for unloading. The bucket is unloaded by opening the jaws. To loosen hard and frozen soils, excavators are equipped with the following equipment: a single-tooth ripper, a hydraulic hammer (breaking rocks, breaking up asphalt when repairing roads).
 A dragline is an O.E. working equipment with a bucket suspended from a boom on a lifting rope and moved by a traction rope when digging the soil.
A dragline is an O.E. working equipment with a bucket suspended from a boom on a lifting rope and moved by a traction rope when digging the soil.
Construction draglines with buckets of 0.3 to 3 cubic meters for unloading soil below the parking level when excavating pits and trenches, during underwater excavation, loading and unloading bulk and crushed materials. They work primarily with unloading into a dump.
Replaceable working tools (hydraulic hammers, hydraulic rammers, rippers, forks, grabs, pincer grabs, leveling blades, etc.) Excavators - levelers, part-rotary excavators, mini excavators (qk = 0.03-0.2 cubic meters) in cramped and hard-to-reach areas places, inside buildings, during repair work, micro-excavators (b=1m, qк=0.02cub.m)
Classification of continuous excavators (E.N.D.). Purpose, scope of application, device, work process, technological capabilities and performance of trench and chain excavators
E.N.D. are earth-moving machines that continuously excavate soil while simultaneously loading it into a vehicle or dump. The working body is equipped with several buckets, scrapers, cutters, which alternately separate the soil from the massif. They are mounted on a single working body - a rotor or a closed circuit.
They are classified by:
purpose or type of work performed:
a) trench;
b) career;
c) construction and quarry;
by type of working body:
a) rotary;
b) chain (scraper, milling);
by digging method:
a) longitudinal;
b) transverse.
Rotors are used to develop trenches of limited depth (up to 3 m). Chain deep up to 6m or more. They are used to develop homogeneous soils up to category IV. Large rocky inclusions reduce the service life of these machines. For frozen soils, the main parameter of trench excavators is the depth of the trench being torn off, the weight and power of the engine.
ETR-254 is a rotary trench excavator of the fourth model for developing trenches 2.5 m deep.
ETC-165 is a chain trench excavator of the fifth model for developing trenches up to 1.6 m deep.


 A trench excavator consists of two parts - a tractor and working equipment, connected to each other by a semi-trailer or mounted circuit.
A trench excavator consists of two parts - a tractor and working equipment, connected to each other by a semi-trailer or mounted circuit.
The working equipment of the trench excavator ensures that the soil in the trench of the designed depth and width is separated from the mass with or without slopes, is completely removed from the trench and dumped into a parapet (cavalier) next to the trench. The last operation is performed by a dump belt conveyor installed perpendicular to the longitudinal axis of the trench in the rotor cavity (on bucket-wheel excavators) or on a tractor (on chain excavators). To develop narrow trenches (cracks), non-conveyor scraper milling trench excavators are used.
An excavator is a specialized mechanism for excavating soil. Area of use: construction industry, mining, irrigation.
Classification of earthmoving equipment
Excavator fleets are distinguished by characteristic features - dimensions, power, purpose and other technical parameters.
Chassis type
There are several main groups:
- tracked;
- walking;
- wheeled;
- rail;
- floating;
- combined chassis.
By operating mode
Depending on the nature of the work, all earth-moving mechanisms are divided into two large classes.

Excavator with continuous work process
It has several buckets in its design, which allows it to simultaneously perform operations of excavating and moving soil.
Good to know! Rock mining can be carried out in a horizontal, vertical plane, or in a circle.
Used on homogeneous soils. Their use is limited to the construction of depressions where relocation of dump soil to the surface is required. With their help, ditches, trenches, and channels are constructed. They are divided into rotary and chain. The executive body of the first group is a rotating wheel on which buckets are placed.
On chain excavators, they are fixed to a movable structure, which is a set of rippers, scoring elements, and sump scrapers.
The presence of a significant number of buckets ensures continuity of the process, optimizes the necessary efforts, reduces loads, and increases the productivity of excavation work.
The trenches can be rectangular, trapezoidal, stepped and reach a depth of 4 m and a width of up to 2 m. The dump soil is stored away from the trench.
Chain multi-bucket trench excavators are used in areas where soft soils occur without the presence of large inclusions. Rotary modifications are used for stripping operations in open pits.
Cyclic excavator
Equipped with one bucket. Development and excavation of soil is carried out sequentially. Mechanisms of this design are used in mixed soils with stone inclusions of hard rocks. They represent a more unified segment of equipment compared to the multi-bucket version.

According to operational purpose
Earthmoving equipment is divided into groups:
- career;
- overburden - for operation in areas of surface mining of minerals and hard rocks;
- mining combines - for underground work;
- construction universal.
Working body drive model
Has several modifications:
- hydraulic systems are the most numerous category, and the main advantage is the ability to actively use attachments in the form of hydraulic hammers, punches, specialized grips, and rotary hammers;
- diesel-electric vehicles - weight from several tens to hundreds of tons;
- electric drive units - superexcavators powered by power lines.
By power equipment
The choice of engine depends on the conditions in which the mechanisms will be operated. Electric motors are more often used in quarry equipment. This is due to the relative cheapness of electricity. When constructing highways, it is rational to use diesel units.
If the excavator's actuators are driven by one engine, such a drive is called single-engine, and if there is a separate power plant for each group of equipment, it is called multi-engine.
Features of single-bucket excavators
The most common class. Their grouping has its own principles and a number of characteristics.
Size class index
- number 0-8: from extra light to extra heavy - weight from 3 to 160 tons;
- by power; 10 - 800 hp;
- bucket volume: 0.1 - 10 m3.
Equipment heavier than class 8 is classified as super-heavy. Designed according to individual orders.
By type of structure supporting the bucket
- The swinging mast is a rigid element. The bucket is attached to it with cables. The turning of the working body is carried out using a system of steel ropes. This scheme is called dragline. It is used on models of walking excavators, which are used in stripping and mining operations. The grab of floating variants and loaders is also suspended on masts.
- The telescopic boom is similar in design to the boom of truck crane installations. Rarely used. Used on excavators where there is no need to ensure increased rigidity of the boom element during work.
- The articulated boom is characterized by an increased coefficient of strength and mobility. Used on heavy excavator models.
- Breaking boom - used in conjunction with a hydraulic drive on most universal excavators.

By type of working body
- A simple bucket (option - having a folding bottom).
- Straight shovel - for excavating soil above the horizon of the excavator.
- A backhoe is equipment for developing soil below the mechanism when constructing pits, trenches, and excavations.
- Grab - consists of two halves, which are lowered to the ground, and when lifted, they grab the ground and slam shut. It is used on loose, friable soil categories.
- Dragline (scraper) - cuts the soil when pulled tangentially to the ground plane.
Small mechanisms
A typical representative of this class is a compact single-bucket crawler-mounted excavator with a breaking boom and a hydraulic drive system. Total weight up to 1500 kg with a bucket up to 0.15 cubic meters. m. They are not equipped with a blade, but they have a solid set of extras. equipment.
Helpful information! There are babies with a motor up to 50 cm 3 .
Due to their efficiency, versatility and ability to work in cramped conditions, they are gaining popularity in construction. Today, there is a growing demand for earthmoving machines with a small bucket on pneumatic wheels, which have increased maneuverability for rapid relocation from one site to another.
Giant excavators
Narrow-profile tasks for specialized equipment served as an impetus for the creation of super-powerful prototypes. This applies to walking excavators. The chassis uses a base plate that moves around the site using hydraulic motors. The excavator equipment placed on it has unique performance. A striking example is single-bucket draglines with a bucket volume of up to 100 m 3. The length of the boom ranges up to 130 m. It is worth noting the rotary modifications, in which the working body is in the form of a wheel with a set of buckets with a diameter of up to 18 m. The depth of soil development reaches 45 m, and the height is 38 m. The weight is up to 15,000 tons. Such working dimensions allow for wide coverage of the treated area. The average movement speed is up to 450 m per day.
Technical help! Similar models were created in the 80-90s and function to this day. This indicates the reliability of such excavators.
A special feature of walking earth-moving equipment is the combination of the properties of cyclic machines and multi-bucket models.
Results
A rich set of types of excavators with a specific operating mode, type of power unit, and the nature of the technological equipment makes it possible to choose a suitable modification for the development of soils of categories 1-6 and various algorithms of use.
The article was prepared by specialists of the Sfera company. Information about