Ekskavaatorite klassifikatsiooni- ja projekteerimisskeemid. Ekskavaatorid. Klassifikatsioon, kasutusala Traktoripõhised ekskavaatorid
Kopp-ekskavaatorid
Ekskavaator(alates lat. . väljakaevamine- õõnes) - pinnase teisaldamismasin, mis on ette nähtud pinnase kaevamiseks ja seejärel prügimäele või sõidukitesse mahalaadimiseks.
Üksik kopp ekskavaator- tsükliline mullatöömasin pinnase arendamiseks (kaevamiseks), teisaldamiseks ja laadimiseks.
Töökorpus on noole, käepideme või trosside külge kinnitatud liigutatav kopp. Kopp laaditakse arendatava pinnase suhtes liikudes. Sel juhul jääb ekskavaatori korpus maapinna suhtes liikumatuks – veojõu tekitavad ekskavaatori mehhanismid. See eristab ekskavaatorit kaabitsast ja laadurist, kus kopa laadimisel tekib tõmbejõud masina kere liigutamisega.
Ühekopaline ekskavaator on kõige levinum ehituses ja kaevandamises kasutatav pinnase teisaldusmasinate tüüp.
Ekskavaatorid vahetasid välja ekskavaatoreid, mehhaniseerisid oma töömahuka käsitsitöö ja tõstsid oluliselt kaevetööde tootlikkust. Kaasaegsete ehitusekskavaatorite kopa maht võib ulatuda 2-4 meetrini.
Ekskavaatorid mõeldud :
Kaevetööde ja muldkehade arendamiseks;
Kaevude, kanalite, kaevikute kaevamiseks;
Tammide ja puhastusalade ehitamisel
Eemaldamistöödel ja karjäärides,
Puisteehitusmaterjalide ümberlaadimisel
Planeerimistööde ajal ja paljudel muudel juhtudel.
Igat tüüpi töö nõuab selle ekskavaatori jaoks kohandatud ja igaks konkreetseks juhtumiks mõeldud seadmete kasutamist
Rakendus . Nende kasutusala ehituses on praktiliselt piiramatu. Seal, kus sellele masinale on juurdepääs, tehakse kaevetööd suure kiirusega ja kvaliteetselt.
Millisteks konkreetseteks töödeks on ekskavaatorid mõeldud? Neid saab kasutada süvendite, kanalite, kaevikute kaevamisel, kaeve- ja muldkehade väljatöötamisel, tammide ja puhastusalade rajamisel, laotamisel ja karjääridel, puistematerjalide käitlemisel ja tasandustöödel ning paljudel muudel juhtudel.
Ekskavaatorid võivad pinnast kaevata nii selle koha tasemest kõrgemal, kus nad seisavad, kui ka sellest madalamal. Nad võivad töötada kitsastes tingimustes ja arendada pinnast veekihi all, laadida välja kaevatud pinnase sõidukitesse ja visata selle kaevamiskohast märkimisväärsel kaugusel prügimäele, viimistleda kaevikute ja süvendite seinte kalde ja pinnaga. , samuti planeerida piisava täpsusega horisontaalpind ehitusplatsil või kaevikute ja süvendite põhi.
Ilmselgelt eeldab iga tööliik selleks otstarbeks kohandatud ekskavaatorite ja igaks konkreetseks juhtumiks mõeldud töövahendite kasutamist.
Kuid kopp-ekskavaatorid on saanud ehituses laiemalt levinud kui kopp-ekskavaatorid tänu sellele, et neil on suurem mitmekülgsus.
Mitmekülgsus on ekskavaatori võime teostada mitmesuguseid pinnasetöid alates kaevikute, süvendite, kanalite ehitamisest kuni muldkehade ja tammide täitmiseni ning peale- ja mahalaadimistöödeni. Seda kõike saab ekskavaator muidugi teha vaid erinevate vahetatavate töövahendite abil.
Klassifikatsioon. Ühe kopaga ekskavaatoreid klassifitseeritakse šassii tüübi, ajami tüübi, tööseadme tüübi ja tööseadme pööramise võimaluse järgi tugipinna suhtes.
- Kui tööseadet on võimalik pöörata tugipinna suhtes
A). Täielik pöörlemine

Joon. Täispöörleva ekskavaatori skeem
Tööseadmed, ajamid, juhikabiin ja mootor on paigaldatud pöördalusele, mis omakorda on kinnitatud šassiile pöördtugiseadme (SDU) abil ja mida saab selle suhtes pöörata igas suunas ja mis tahes nurga all. Täispöörlevate ekskavaatorite šassii ja pöörleva platvormi hüdrosüsteemi osad on ühendatud kollektori abil, mis võimaldab piiramatul arvul täispöördeid ühes suunas.
b). Osaline pöörlemine

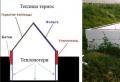
Riis. Poolpöörleva ekskavaatori skeem
ratastraktori šassiil:
1. Traktorile monteeritud ekskavaatoriraam;
2. Rotary kolonn;
3. Nool;
4. Käepide;
5. Poomi ajamiga hüdrosilinder;
6. Hüdrauliline silinder käepideme ajamile;
7. Hüdrauliline silinder kopaajami jaoks;
9. Võimalus paigaldada kopp ekskavaatori asendisse;
10. Vahetatav lastikonks;
11. Buldooseri tera;
12. Tugijalad.
Tööseade kinnitatakse šassiile pöörleva kolonni abil. Paljudel seda tüüpi masinatel on pöördsammas paigaldatud põikisuunalistele juhikutele, mis võimaldab seda liigutada koos töövahenditega paremalt vasakule, millele järgneb jäik fikseerimine töövahendi mugavamaks asendiks. Tööseadmete pöörlemine toimub algsest asendist 45-90 kraadise nurga all. Mootor, mehhanismid ja juhikabiin asuvad fikseeritud šassiil. Praegu on traktoritele monteeritud ekskavaatorid osaliselt pöörlevad.
- Šassii tüübi järgi
A). Traktorile monteeritud

Riis. Belarus traktorile monteeritud ekskavaator.

Riis. Välismaal valmistatud traktorekskavaator.
Alusšassiina kasutatakse traktorit, enamasti ratastega traktorit. Osalise pöörlemise ekskavaatori seadmed paigaldatakse traktori taha (harvemini küljele), spetsiaalsele raamile. Levinuimad on 1.4 klassi traktoritele monteeritud ekskavaatorid. Kopa tüüpiline maht on 0,2-0,5 m³. Neid kasutatakse väikeste kaeve- või laadimistööde tegemiseks, kõige sagedamini tehnovõrkude remondil. Tööseadmete disain võimaldab kopa kiiresti ümber paigutada esi- või ekskavaatoriga töötamiseks. Kopa saab asendada haaratsi, kahvli või konksuga. Sõitmiseks kasutatakse baastraktori mootorit. Tööseadmete ajam on hüdrauliline. Tänu suhteliselt suurele kiirusele jõuavad nad kiiresti baasist 20-30 km kaugusel asuvale töökohale. Transpordi- ja buldooseritööde teostamiseks saab kasutada ka traktorit, millele on lisatud ekskavaatortehnika.
b). Auto šassiil

Riis. Ekskavaator EOV-4421 (Cuirassier) KrAZ-255 šassiil.

Riis. UDS ekskavaator Tatra-141 šassiil
Alusšassiina kasutatakse veoautot, enamasti maastikusõidukit. Neil on suur liikumiskiirus. Neid kasutatakse juhtudel, kui on vaja suurt liikuvust: sõjalistes asjades (inseneriüksused, maanteeväed), päästetööde tegemisel, teedeehituse ajal ja kanalite puhastamisel. Töövahenditeks on peamiselt ekskavaator. Ekskavaatoreid toodetakse teleskoopnoole ja pöörleva kopaga, mis võimaldab kiiresti sirgelt labidalt tagurpidi labidale üle minna. Ajamil saab kasutada kas baassõiduki mootorit või eraldi pöördlauale paigaldatud mootorit.
V). Pneumaatilised rattad

Riis. Kaasaegne pneumaatiline ratasekskavaator
hüdroajamiga.

Riis. Juhtmeajamiga pneumaatiline ratasekskavaator 50-60ndatest
Ekskavaatoritel on oma spetsiaalne šassii, mida toetavad õhkrehvidega rattad. Kõige sagedamini teostatakse neid täispöördega. Stabiilsuse suurendamiseks ja libisemise vältimiseks kopa laadimisel on neil tugijalad. Nende liikumiskiirus on kuni 30 km/h. Saab pukseerida veoautodega kiirusega kuni 40 km/h. Läbitavus pehmel pinnasel on piiratud. Neid toodetakse erinevates suurusrühmades – alates mikroekskavaatoritest kopa mahuga 0,04 m³ kuni raskete ratasekskavaatoriteni – kopa mahuga kuni 1,5 m³. Tulenevalt teostatavate tööde spetsiifikast: süvendite, kaevikute arendamine, tasandustööd - töövahendid - peamiselt ekskavaator. Saab kasutada haaratsi, haaratsi või hüdrohaamriga pinnase kobestamiseks. Neid kasutatakse laialdaselt erinevate ehitus- ja remonditööde tegemisel.
Šassiirattaid saab vedada kas tööseadme mootorist mehaaniliste või hüdrauliliste jõuülekannete (hüdromootorite) kaudu või eraldi mootorist.
G). Jälgitud

Riis. Kaasaegne roomikekskavaator

Riis. DEMAG Bagger ekskavaator on oma klassi üks suuremaid
Ekskavaatoritel on oma spetsiaalne roomikajamiga šassii. Esitatakse täispöördes. Neil on suur manööverdusvõime ja madal erirõhk suure massiga maapinnale. Nad võivad töötada nõrkadel ja vettinud muldadel, sealhulgas turba kaevandamisel. Nende liikumiskiirus on 2-15 km/h. Töökohale transporditakse need traktoritega spetsiaalsetel traalidel.
Kopamahtude töövahemik on väga lai: alates kopamahuga miniekskavaatoritest 0,04 m³ koppmahuga karjääri teha 10 m³. Olemas on ka eriti rasked kopa mahutavusega roomikekskavaatorid 26 m³ tootja DEMAG (Saksamaa).
Töövahendid: sirge labidas, ekskavaator, draglain. Saab kasutada haaratsi, haaratsi, hüdrohaamriga pinnase kobestamiseks. Neid kasutatakse laialdaselt ehituses ja kaevandustes. Paljudel roomik- ja pneumaatiliste ratasekskavaatorite mudelitel on ühtne pöördplatvorm ja töövarustus.
D). Jalutamine. Kõndiv ekskavaator - kõndiv ekskavaator, tavaliselt koos draglainivarustusega. Hüdraulilise kõnni (erinevalt röövikust) jõuseadme kasutamine võimaldab vähendada koormust maapinnale (masinate kaal võib ulatuda sadadesse ja isegi tuhandetesse tonnidesse) ja tõsta töökindlust.


Riis. Kõndiv ekskavaator:
A- üldine vorm; b– käiguosa tüüp.
Pöördplatvorm koos kõndiva ekskavaatori seadmetega on paigaldatud alusplaadile. Käpad on ühendatud pöördlauaga, mis tõstetakse üles (ei puuduta maad), kui ekskavaator töötab. Kui ekskavaator liigub, toetuvad käpad maapinnale. Sel juhul tõstetakse alusplaat maast lahti. Ekskavaator liigub ühe sammu edasi (mõne mudeli puhul on võimalik liikuda ka tagasi). Pärast seda tõusevad käpad ja naasevad algasendisse. Suured kopa mahutavusega kaevandusekskavaatorid toodetakse kõndimiskiirusel 15 m³ - 40 m³ ja noole lend kuhu 65 m - 150 m. Töövahendid - dragline. Kõndivad ekskavaatorid teevad eemaldamistöid (maavarade lademete puhastamine aherainest), samuti kaevandavad mineraale ja viivad need prügimäele (kuni 40 m). Mineraalide laadimist kõndivate ekskavaatoritega sõidukitesse ei saa teostada.
e). Raudtee.


Ekskavaatori šassiina kasutatakse raudteeplatvormi. Kasutatakse raudteede remonditöödel. Nende ämbri maht on kuni 4 m³. Pöördplatvorm ja seadmed on sageli ühendatud roomikekskavaatoritega.
ja). Ujuv.

Riis. Ujuv ühekopaline ekskavaator - süvendaja.
Pontoonile paigaldatakse töövahendid (draiver või haarats). Neid kasutatakse peale- ja mahalaadimistöödel, liiva, kruusa kaevandamisel reservuaaridest, põhjapuhastus- ja süvendustöödel. Ujuvad ekskavaatorid erinevad haaratsitega varustatud ujuvkraanadest väiksema kõrguse ja lihtsustatud noolekonstruktsiooni poolest.
Mootori tüübi järgi.
A). Auruekskavaatorid - mootorina kasutatakse aurumasinat. Need olid levinud 20. sajandi alguses. Hetkel ei ole tootmises. Aurumasina ja ekskavaatori tööseadmete pöördemomendi-kiiruse karakteristikud on hästi kooskõlastatud, mis lihtsustab mehaanilisi jõuülekandeid.

Riis. Aurulabidas.
b). Sisepõlemismootoriga ekskavaatorid on kõige levinumad tüübid. Ekskavaatoril on oma mootor, enamasti diisel. See tagab töö autonoomia. Kaasaegsetele ekskavaatoritele paigaldatud mootorite võimsusvahemik on väga lai (vt suurusgruppe).
Sisepõlemismootori ja ekskavaatori tööseadmete pöördemomendi-kiiruse karakteristikud on ebaühtlased. Selleks on vaja mehaanilistel ekskavaatoritel kasutada sobivaid käike (käigukastid, pöördemomendi muundurid). Hüdraulilistes ekskavaatorites tagavad koordinatsiooni hüdraulilised jõuülekanded.
V). Elektrilised ekskavaatorid - elektrimootoreid kasutatakse tööseadmete juhtimiseks, saades energiat välisvõrgust või oma diisel-elektriseadmest. Kaevandusekskavaatorite jaoks kasutatakse elektriajamit, mis toidetakse välisvõrgust. Sellised ekskavaatorid on ökonoomsed ja ei saasta karjääri atmosfääri. Ujuvates ekskavaatorites kasutatakse elektriajamit, mis töötab oma diisel-elektriseadmega.
G). Plahvatusohtlikus keskkonnas (kaevandustes) töötavatel ekskavaatoritel ei ole peamasinat. Nende hüdroseadmed varustatakse välise õlijaama kõrgsurvevedelikuga.
Mehaaniliste jõuülekannete tüübi järgi (tööseadmete ajamid):
A). Rühma mehaanilise trossiülekandega (mehaaniline);
Mehaanilise ekskavaatori vintsid.
Veojõud töötavatele osadele edastatakse vintside abil juhitavate trosside (või kettide) kaudu. Vintsid juhitakse ekskavaatori mootorist mehaaniliste jõuülekannete kaudu (käigukast, kett, hõõrdumine, tigu).
Universaalne mehaanilise ajamiga ekskavaator on varustatud kolme trumliga vintsiga. Vintsi nooletrumlit kasutatakse noole juhtimiseks (tõstmiseks ja langetamiseks). Tõstetrumlit kasutatakse kopa tõstmiseks (või ekskavaatoriga töötamisel käepideme tagastamiseks). Tõmbetrumlit kasutatakse kopa tõmbamiseks ekskavaatori poole (draivi või ekskavaatoriga töötamisel). Sirge labidaga töötades on tõmbetrummel ühendatud käepideme survemehhanismiga.
Mehaanilist trossiülekannet on ekskavaatoritel varem laialdaselt kasutatud. Kaasaegsetes mudelites on selle kasutamist vähendatud järgmistel põhjustel:
Mehaanilise köieajamiga ekskavaatorid on keeruka konstruktsiooniga ja sisaldavad suurel hulgal kulunud esemeid (siduri hõõrdkatted, pidurilindid, trossid).
Trossiajam tagab piiratud arvu tööseadmete elementide iseseisvaid liikumisi;
Köievedu on tehniliselt keeruline automatiseerida;
Trossiajam ei taga tööseadmete elementide täielikku fikseerimist antud asendis.
Kaasaegsetel mudelitel kasutatakse mehaanilist trossiülekannet ainult lohistamine või haarata.

Riis. Ekskavaatori mehaanilised vintsid
b). Individuaalse elektrilise vintsi ajamiga (elektromehaaniline);
Veojõud töötavatele osadele edastatakse vintside abil juhitavate trosside (või kettide) kaudu. Iga vintsi ja abimehhanisme käitab individuaalne elektrimootor. Seda ajamit kasutatakse rasketel kaevandustel (kaasa arvatud kõndimisel) ja tööstuslikel ekskavaatoritel.
V). Hüdraulilise ajamiga;
Hüdrauliliselt käitatavates ekskavaatorites (hüdraulilised ekskavaatorid) tekitavad tööseadmete elementidele jõudu hüdrosilindrid ja hüdromootorid. Ekskavaatori mootor pöörleb hüdropumpa, mis tekitab hüdrosüsteemi survetorustikus töövedeliku rõhu. Hüdrauliliste jaoturite süsteemi kaudu ühendatakse hüdrosilindrite (hüdromootorite) õõnsused hüdrosüsteemi töö- või äravoolutorudega, mis tagab tööseadmete liikumise. Neutraalses asendis (lukustatud hüdrosilindrite õõnsustega) on tööseadmete asend fikseeritud. Ekskavaatori transportimiseks puksiiri abil on võimalik lülitada noole hüdrosilinder ja pöördmehhanismi hüdromootor neutraalse transpordi ("ujuv") režiimile.
Indekseerimine.
Ühekopaga universaalsete ekskavaatorite indeksi struktuur.
Lugeja näitab traktorile monteeritavate ekskavaatorite massi.

Tehnilised andmed.
Tabel 1
2–4 suurusrühma ühekopaga universaalsete ekskavaatorite peamised omadused

Seade. Ekskavaator võib olenevalt otstarbest olla erineva konstruktsiooniga.
Töövahendid– need on masinakomponendid, mille abil ekskavaator otse pinnase kaevab (kopp, poom, käepide oma ajamiga). Nendel juhtudel mängib teatud rolli ka masina veermiku tüüp: kas ekskavaator on varustatud roomikveermikuga või on sellel pneumaatiline ratta alusvanker, mis võimaldab masinat kiiresti objektilt objektile liigutada. Oluline on ka töövahendite pööramise võimalus ehk teisisõnu pöörleva platvormi olemasolu, mis loob rohkelt võimalusi pinnase mahalaadimiseks ja muudeks töödeks. Vastavalt sellele on konkreetset tüüpi kaevetööde omadused, mida peab tegema ekskavaator, teatud tööseadmetega ekskavaatorite kasutamine, šassii ja ajami tüüp.

Joonis fig.a. Ekskavaatori tööseadmed - ekskavaator:
1 - pöörlev raam; 2 – juhikabiin; 3 Ja 4 – noole alumised põhi- ja ülemised pikendusosad; 5 Ja 6 – käepideme ja kopa hüdrosilindrid; 7 - käepide ; 8 – kopahoob; 9 – kulp; 10 – veojõud; 11 – noole hüdrosilinder; 12 - nool;


Joonis fig. Ekskavaatori töötehnika – sirge labidas:
1 - nool; 2 - käepide; 3 – veojõud; 4 – kopphammas; 5 – kulp; 6 – ämbri põhja aas; 7 -10 - hüdrosilindrid; I- II– kaevekopa asukoht.
LISAKS
Ühekopaga ekskavaatori töövarustus.
Ühekopaga ekskavaatorite tööseadmed - ühe kopaga ekskavaatori tööseadmete komplekt.
Ühekopaga ekskavaatori põhimasin tagab erinevate tööseadmete toimimise. Viimast saavad teha vahetustega töötajad. Pinnase kaevamise töövahendeid nimetatakse peamiseks ja muude toimingute tegemiseks mõeldud töövahendeid täiendavateks.
Põhilised töövahendid.
A). sirge labidas

Riis. Sirge labidaga hüdroekskavaatori töötsükli skeem.

Riis. Karjääri ekskavaator sirge labida ja trossiajamiga.
sirge labidas- põhilised töövahendid pinnase arendamiseks (kaevamiseks) ekskavaatori parkimistasapinnast kõrgemale. Sirge labida kopp on kinnitatud käepideme külge. Käepide on omakorda hingedega poomi küljes. Poom on hingedega kinnitatud masina pöörlevale platvormile. Hüdraulilistes ekskavaatorites on käepidemel olev kopp liikuvalt fikseeritud - kopa mahalaadimine tagatakse hüdrosilindri abil ümberkukkumisega. Mehaaniliste ekskavaatorite puhul ei muutu kopa asend käepideme suhtes töötamise ajal – kopp laaditakse maha, kui selle põhi avatakse. Nad kaevavad pinnast ekskavaatorist lähtuvas suunas. Sirge labidas tagab suurima kaevamisjõu ja suurima tootlikkuse (minimaalse arvu toimingute tõttu ühes kaevamistsüklis). Kasutatakse kaevandus- ja laadimistöödel.
Eesmise labidaekskavaatori töötsükkel koosneb järgmistest toimingutest:
Platvormi pööramine - pärast kopa laadimist pööratakse platvormi koos ekskavaatori tööseadmetega. Kopp liigub mahalaadimiskohta. Selle asend masina pöördlaua suhtes ei muutu.
Poomi tõstmine – enne kopa mahalaadimist tõstetakse ekskavaatori poom, et tõsta laadimiskõrgust.
Kopa mahalaadimine - hüdraulilistel ekskavaatoritel toimub kopa pööramisega käepideme suhtes (kallutamine). Mehaanilistel ekskavaatoritel avatakse kopa põhi.
B). Ekskavaator

Riis. Ekskavaatoriga hüdroekskavaatori tööskeem
Ekskavaator- põhilised töövahendid pinnase arendamiseks (kaevamiseks) allapoole ekskavaatori parkimistaset. Seda kasutatakse süvendite, kaevikute kaevamisel, nõlvade planeerimisel ja muldkehade täitmisel. Saab kasutada laadimisoperatsioonidel. Ekskavaatoriga töötades kaevatakse pinnas ekskavaatori suunas. Hüdraulilised ekskavaatorid suudavad pinnast välja kaevata oma parkla tasemest kõrgemal, kuigi väiksema efektiivsusega kui sirge labidaga.
Sõltuvalt kasutatavate ajamite tüübist on ekskavaatori töötsükkel erinev.
Sõltumatu noole-, kopa- ja õlaajamiga hüdroekskavaatoritele:
A). Poomi süvend süvendisse koos käepideme samaaegse positsioneerimisega;
V). Poomi süvendamine samaaegse käepideme ümberpööramise ja kopa pööramisega, et vältida mulla väljavalgumist.
d). Kopa mahalaadimine, keerates seda käepideme suhtes.
Kahe nööriga ajamiga, sõltuva nooleasendi ja fikseeritud kopaasendiga mehaaniliste ekskavaatorite jaoks:
A). Poomi ja käepideme süvendisse süvendamine (teostatakse tõstetrossi vabastamisega);
V). Poomi ja käepideme eemaldamine süvendist (teostatakse tõstetrossi pingutamisega, kui veoköis on pingul ja pidurdatud);
G). Platvormi pööramine töövahenditega;
d). Kopa mahalaadimine, keerates käepidet noole suhtes ekskavaatorist eemale (teostatakse tõsteköie pingutamisega, kerides samal ajal lahti veoköisi).
Ekskavaator on kõige mitmekülgsem töövahend. Tagab kopa positsioneerimise suure täpsuse nii maapinna kui ka sõiduki suhtes, millesse pinnas laaditakse.
IN). Kopprotaatoriga ekskavaatorid.
Mitmed ekskavaatorimudelid, näiteks UDS-114 (valmistatud Tšehhoslovakkias), on varustatud kopa ümberpööramisseadmega (rotaatoriga), mis võimaldab kiiresti lülituda edasi-kopa režiimilt ekskavaatori režiimile.
G). Kallakute planeerija.
Ekskavaator, mis on mõeldud nõlvade planeerimiseks teede-, melioratsiooni- ja maastikuehituses. Kallaku tasandusseade tagab, et kopa lõikeserv liigub maapinna suhtes sirgjooneliselt, mis on suunatud horisondi suhtes etteantud nurga all. Selleks paigaldatakse hüdroekskavaatorile automatiseeritud juhtimissüsteem (hüdrauliline või elektrooniline), mis tagab noole, õla ja kopa koordineeritud liikumise. Nõlvade planeerijatena kasutatakse teleskoopnoolega ekskavaatoreid.
Adrat kasutatakse ka tasandustöödel. Paigaldatud mehaanilistele ekskavaatoritele. See on poom, mida mööda liigub trossiga käru, mille küljes on kopp. Planeerimisnurk määratakse poomi nurga järgi. Adraga kaevamise suunda saab muuta, paigutades kopa käru suhtes ümber.
E). Dragline.
Dragline on töövahend, mille kopp on riputatud painduvalt trossi külge. Kasutatakse pinnase arendamiseks allpool ekskavaatori parkimistaset. Pinnast kaevatakse ekskavaatori poole. Seda kasutatakse süvendite väljatöötamisel, muldkehade täitmisel, kaevandamisel ja veehoidlate süvendamisel.
Drainil on suurim raadius ja kaevamissügavus ning kõrgeim laadimiskõrgus võrreldes teist tüüpi tööseadmetega.
Hüdraulilise ekskavaatori draglaini käitamiseks on sellele paigaldatud kahe trumliga peavints, mida juhib hüdrosüsteem.
Mehaanilise ekskavaatori alusmasina ümbervarustust ei ole vaja draiviga töötamisel.
JA). Haara.
Haaratsit kasutatakse kitsaste sügavate süvendite (kaevude) arendamiseks ning peale- ja mahalaadimistööde tegemiseks. Nii hüdraulilised kui ka mehaanilised ekskavaatorid võivad olla varustatud haaratsitega.
Hüdraulilistel ekskavaatoritel on haarats kopa asemel käepideme külge kinnitatud ja sellel on lõugade hüdrauliline ajam. Haaratsi saab kinnitada ka survevarda külge, mis tagab selle tungimise süvendisse 6 meetri võrra (SRÜ-s toodetud ekskavaatoritel) või rohkem. Tõukurvarras on teleskoopnoom, mis on paigaldatud ekskavaatorile käepideme asemel.
Mehaanilistes ekskavaatorites riputatakse haarats trosside külge.

Riis. Kahekordne lõualuu haarats

Riis. Haaratsiga ekskavaator
Z). Lisatöövarustus:
Ripper;

Riis. KOMATSU ekskavaator koos ripperiga
Vahetatavad töövahendid, mis on mõeldud kõva (külmunud) pinnase kobestamiseks, ehituskonstruktsioonide, asfalt- ja betoonkatte lõhkumiseks.
Mehaaniliste ekskavaatorite ripper on monoliitne teraskoorem, mille alumine osa on kiilu- või piigikujuline. Trossi külge riputatud. Töö ajal tõuseb ripper trossi pinge tõttu umbes 3-6 meetri kõrgusele ja langeb vabalt maapinnale (kui köis on vabastatud). Kiilripperi kaal olenevalt ekskavaatori suurusgrupist on 0,5 - 6 tonni.
Hüdraulilised ekskavaatorid on varustatud hüdrauliliselt käitatava haamer-ripperiga. Selle tööpõhimõte sarnaneb tungrauaga. Paigaldatud ämbri asemel.
Rippijana saab kasutada ekskavaatori noole külge kinnitatud diiselvasarat.
Vaia vedaja;

Riis. Vaiaajajaga ekskavaator
Kraana;
Kuna ekskavaatori ja kraana põhimasin on sarnase konstruktsiooniga, saab mitmeid ekskavaatorimudeleid varustada kraanaseadmetega. Kuna koorma vertikaalse liikumise kiirus kraana juures peab olema mitu korda väiksem ekskavaatori kopa tõstekiirusest, hoitakse tõstetrossi läbi rihmaratta.
Manipulaator;

Riis. Manipulaatoriga ekskavaator CATERPILAR teostab demonteerimistöid raudbetooni lõikamiseks kääridega
Manipulaator on kopa asemel monteeritav haarats, mida kasutatakse paigaldus- ja demonteerimistöödel. Praegu toodavad mitmed ettevõtted Venemaal ja välismaal spetsiaalseid ühe kopaga ekskavaatoritel põhinevaid manipulaatormasinaid. Sellistel masinatel on suurem noole ulatus kui ekskavaatoritel ja keerulisem hüdrosüsteem, mis tagab haaratsi positsioneerimise kolmes tasapinnas.
Kännu eemaldaja;
Hüdraulilise purustiga ekskavaator;

Joon Hüdraulilise purustiga ekskavaator
Kändude eemaldamiseks saab kasutada kopp-ekskavaatorit. Hüdraulilistel ekskavaatoritel on selleks otstarbeks kopa asemel paigaldatud haaratsi (vt artiklihaarat). Väljajuurimiseks tuuakse haarats kännu juurde, lõuad aetakse laiali ja maetakse maasse, kännu juurestiku alla. Järgmiseks viiakse haaratsi lõuad kokku ja noolt tõstes tõmmatakse känd välja. Kogu seda protsessi juhib üks juht.
Mehaaniliste ekskavaatoritega kändude väljajuurimisel kinnitatakse veo- ja tõstetrossi külge spetsiaalne ankur. Ekskavaatori operaator toob ankru kännu juurde ja assistent matab ankru käe käsitsi kännu juure alla. Pärast seda pingutatakse veotrossi nõrgestatud tõstetrossiga, samal ajal kui ankur haakub kännu külge. Kahe trossi samaaegsel pingutamisel tõmmatakse känd välja.
Töö.Ühekopaekskavaatorid (neid nimetatakse mõnikord tsüklilisteks ekskavaatoriteks) teostavad kõiki pinnase kaevamise, teisaldamise ja mahalaadimise toiminguid järjestikku ja tsükliliselt: esmalt täidate kopp pinnasega, seejärel keerake koormatud kopp, pöörde lõpus laadige maha. pinnas kopast (prügilasse või sõidukitesse) ja viige lõpuks tühi kopp laadimiseks tagasi algasendisse. Seejärel korratakse seda toimingute tsüklit.
Mitme kopaga ekskavaatorid (nimetatakse ka pidevakskavaatoriteks) teostavad kõiki pinnase kaevamise, teisaldamise ja mahalaadimise tööoperatsioone üheaegselt. Samal ajal kui mõned ämbrid või noad lõikavad mulda, teised liigutavad seda ja kolmandad laadivad maha. Nende masinate kasutamisel ei esine selgelt korduvat töötoimingute tsüklit.
Ehituses on aga laiemalt levinud labidas ekskavaatorid
kui mitmekopalised, kuna neil on suurem mitmekülgsus. Mitmekülgsus on ekskavaatori võime teostada mitmesuguseid pinnasetöid alates kaevikute, süvendite, kanalite ehitamisest kuni muldkehade ja tammide täitmiseni ning peale- ja mahalaadimistöödeni. Seda kõike saab ekskavaator muidugi teha vaid erinevate vahetatavate töövahendite abil.
Ekskavaatori tööpiirkonda, sealhulgas sõidukite parkimisala nimetatakse nägu , ekskavaatori liikumine mulla arengu ajal - tunneldamine . On tapmisi:
Eesmine (ekskavaatori kasutamisel - ots),
Ja küljed.
Seal on sissetungimised:
pikisuunaline,
Ja põiki.
Sõltuvalt läbiviikude arvust piki kaeve kõrgust eristatakse ühe-, kahe- ja kolmeastmelisi kaevetöid.
Ekskavaatori töötsüklil on viis peamist toimingut:
1.muld;
2.ämbri liigutamine;
3. kopa mahalaadimine prügimäele või sõidukisse;
4.tagurpidi pööramine mulla kogumiseks;
5. ämbri langetamine järgnevaks mulla kogumiseks.
Tsükliaja lühendamiseks kombineerivad ekskavaatorioperaatorid pinnase sõidukisse laadimisel neljanda ja viienda toimingu ning pinnase prügilasse viskamisel teise ja kolmanda toimingu.
Ekskavaatori ja muude pinnaseteisaldamismasinate tootlikkust saab parandada järgmiste meetmetega:
Vähendatud kaevetööde tsükkel;
Tööoperatsioonide kombineerimine;
Poomi pöördenurga vähendamine mahalaadimisel;
Pinnase kobestamine transpordivarustuse jm vaheaegadel;
Ühe tsükliga arendatud pinnase mahu suurendamine;
Suurendatud mahuga ämbrite kasutamise korral nende täielikum täitmine ("korgiga") jne;
Kv koefitsiendi suurendamine seisakuaja vähendamise protsessis (ennetava hoolduse õigeaegne teostamine, tööde mahu tutvustamine, kütuste ja määrdeainete tarnimine jne).
Tööde teostamine ekskavaatorite abil.




Riis. Sirge labidaga ekskavaatori tööpindade skeemid:
A- eesmine nägu; b – külgne nägu.



Riis. Sirge labidaga ekskavaatori esikülje mõõtmete arvutamise skeem:
KOHTA– punkt, kuhu ekskavaator on paigutatud esipaneeli arendamiseks; KOHTA 1 – ekskavaatori parkimine pärast liikumist teatud summa võrra l n /



tabel 2




Joon. Pikisuunaliste läbiviikude paigutus kaevandis:
A - kiirgama; b – paralleelne; V - kombineeritud (katki);
1 – pioneerikaevik; 2, 3, 4, 5, 6, 7 - tungimised.



Riis. Kaevetööde ristlõike jaotus läbiviikudeks:
1 – ekskavaatori liikumistelg; 2 – sõidukite liikumistelg.


Ekskavaator nimetatakse pinnase teisaldamiseks (kaevamiseks ja teisaldamiseks), mis on ette nähtud pinnase, massiivi kergete või purustatud kivimite arendamiseks.
Ekskavaatoreid kasutatakse üle poole kaevetöödest tööstus- ja tsiviilhoonete ja -rajatiste, teede ja raudteede, lennuväljade, hüdrosüsteemide ja naftatorustike ehitamisel, karjäärides ehitusmaterjalide ja maavarade kaevandamiseks. Nende abil avatakse süvendid, kaevikud, kanalid, samuti arendatakse kaevetöid ja mulde ning viimistletakse nõlvad ja müürid.
Maanteevägedes on ekskavaatorid peamised pinnase teisaldusmasinad, neid kasutatakse teepõhja ehitamiseks ja taastamiseks, muldkehade ehitamiseks ja kaevetööde ehitamiseks iseseisvalt ning osana mulla- ja transpordimasinate komplektidest ja kompleksidest. , tõkke-, karjääri- ja laadimis- ja mahalaadimistööde tegemisel alade inseneriseadmete osas osaleda liiklust toetavate üksuste töös.
Ekskavaatorite tööprotsess seisneb pinnase eraldamises massiivist - kaevamisest, pinnase transportimisest mahalaadimisplatsile, mahalaadimisest ja töökeha tagastamisest asendisse uueks kaevamiseks.
Kõik ekskavaatorid, olenevalt tööprotsessi ajast, jagunevad kahte suurde rühma: pidev töö - mitme kopaga; perioodiline (tsükliline) tegevus - ühe ämbriga.
Mitme kopaga ekskavaatorid teostavad mõlemat toimingut (pinnase kaevamine ja teisaldamine) üheaegselt; ühe kopp - järjestikku, katkestades kaevamise pinnase liigutamise ajal. Seega on mitme kopaga ekskavaatorite masina tööaeg, mille jooksul pinnas eemaldatakse, ja tootlikkus kõrgem kui ühekopaga ekskavaatoritel. Mitme kopaga ekskavaatorite kasutamist piiravad nende konstruktsioonilised omadused. Neid kasutatakse peamiselt kaevikute kaevamiseks ja mittemetalliliste materjalide kaevandamiseks karjäärides, kus on homogeenne pinnas ilma kivideta.
Ühe kopaga ekskavaatorid on universaalsed ja laiema kasutusalaga:
kasutatakse pinnase arendamiseks nii ekskavaatori paigalduskoha tasemest kõrgemal kui ka allpool;
kasutatakse kaevetöödeks, peale- ja mahalaadimiseks ning muudeks töödeks, mille jaoks need on varustatud mitut tüüpi vahetatavate töövahenditega;
kasutatakse I-II kategooria muldade arendamiseks ilma pinna esialgse kobestamiseta, III-IV kategooria muldade, sealhulgas külmunud ja kiviste pinnaste arendamiseks, pinnase esialgse kobestamisega plahvatuslikult või rippide abil;
kasutatakse kitsastes oludes, pinnase arendamiseks vee all, selle mahalaadimisel sõidukitesse või prügimäele.
Tööstus toodab erinevat tüüpi ekskavaatoreid, mis liigitatakse liikumisviisi, kasutatava peamootori tüübi, ajamimehhanismide, jõuülekande tüübi, juhtimissüsteemi tüübi, veermiku konstruktsiooni, nurga järgi. pöördaluse pöörlemine ja tööseadmete konstruktsioon.
Liikumise teel Ekskavaatorid on kas maismaal töötavad või ujuvad. Maaekskavaatorid jagunevad iseliikuvateks ja neid liigutatakse veduri või haagise küljes nii ilma lahtivõtmiseta kui ka üksikute elementide demonteerimisega.
Kasutatava pea- (põhi)mootori tüübi järgi Kaasaegsed ekskavaatorid on saadaval diisel- või elektrimootoriga. Diiselmootoreid kasutatakse ekskavaatoritel, mida tuleb sageli ühest kohast teise teisaldada (teede ja raudteede ehitamisel, naftajuhtmete ehitamisel jne). Elektrimootoreid kasutatakse ekskavaatoritel, mis töötavad pidevalt ühes kohas (näiteks karjäärides). Nende kasutamine on lihtsam ja odavam.
Juhtmehhanismide abil Eristatakse ühemootorilisi ekskavaatoreid, milles kõiki töömehhanisme juhib üks või mitu ühel võllil töötavat mootorit, ja mitmemootorilisi ekskavaatoreid, mille puhul iga töömehhanismi käitab eraldi (individuaalne) mootor.
Jõuülekande tüübi järgi liikumine mootorilt töömehhanismidele, ehitusekskavaatorid jagunevad mehaanilisteks, hüdraulilisteks ja elektrilisteks.
Mehaanilistes ekskavaatorites edastatakse liikumine otse peamasinalt kõikidele mehhanismidele, kasutades võlle, hammasrattaid, tigupaare, kette ja muid mehaanilisi jõuülekandeid (mehaaniline jõuülekanne).
Hüdraulilistes ekskavaatorites täidavad jõuülekande rolli hüdropump (üks või mitu), torustikud ja hüdromootorid (hüdraulilised mootorid või hüdrosilindrid).
Elektriline jõuülekande tüüp erineb hüdraulilisest tüübist jõumehhanismide tüübi poolest - elektrigeneraator, elektrivõrgud, elektrimootor (üks või mitu).
Juhtimissüsteemi tüübi järgi Valikus on kang-mehaanilise, pneumaatilise, hüdraulilise, elektrilise ja kombineeritud (elektro-pneumaatilise, elektrohüdraulilise) juhtimisega ekskavaatorid. Kangi mehaaniline juhtimine on paljude puuduste tõttu enamikel masinatel asendatud pneumaatilise või hüdraulilise juhtimisega. Pneumaatiline juhtimine paigaldatakse ühemootorilise ajamiga ja mehaanilise jõuülekandega masinatele. Vastavate ajamitüüpide jaoks kasutatakse hüdraulilist ja elektrilist juhtimist.
Veermiku konstruktsiooni alusel jaotatakse maaekskavaatorid roomik-, pneumaatika- ja kõnniekskavaatoriteks (viimaseid kasutatakse ainult ühekopaga ekskavaatorites).
Jooksev seade võtab vastu ja edastab alusele (pinnasele) koormused masina massist ja töö käigus tekkivatest koormustest ning tagab ka ekskavaatori liikumise.
Ekskavaatorite käiguosa on järgmist tüüpi: G– rööbastee minimaalse lubatud toetuspinnaga; GU– roomik (laiendatud) roomikute suurendatud tugipinnaga, mõeldud tööks madala kandevõimega pinnastel; P– pneumaatiline ratas, mis võimaldab suurendada ekskavaatori liikuvust, hõlbustada ja kiirendada selle omal jõul ülekandmist ühelt objektilt teisele; SSH– spetsiaalne autotüüpi šassii, mis erineb tüübist P asjaolu, et lisaks ekskavaatori pöörlevale osale paigaldatud mootorile on šassiile paigaldatud võimsam mootor, mis tagab ekskavaatori liikumise suurel kiirusel; käiguosa tüüp SSH on tugeva ja madala eriraamiga, mis erineb disainilt veoauto šassiiraamist; A– veoauto šassii; Tr– traktor (tavaliselt kasutatakse pneumaatilisi ratastraktoreid); Jne– järel.
Sõltuvalt pöördlaua pöördenurgast horisontaaltasapinnas nimetatakse ekskavaatoreid täis- või osapöörlevateks.
Täispöörleva ekskavaatori pöörlev osa võib pöörlema ümber vertikaaltelje piiramatu nurga all. Seda tüüpi masinate puhul paigaldatakse mootor ja peamised töömehhanismid pöörlevale platvormile ning tugevdatakse ka tööseadmeid.
Ainult väiketraktoril põhinevad ekskavaatorid on valmistatud osaliselt pöörlevad. Nendel ekskavaatoritel pole pöörlevat platvormi ja tööseadmeid tugevdatakse pöörleva kolonni abil otse jooksval seadmel, mille suhtes see pöörleb piiratud nurga all (180-270 0).
Sõltuvalt sellest, töövahendite projekteerimineÜhe kopaga ekskavaatoritel on painduv jäik vedrustus ja teleskoopnoom.
Paindliku vedrustusega ekskavaatorite nool ja mõnikord ka tööelement (näiteks kopp) riputatakse juhitavatele trossidele. Jäiga vedrustusega ekskavaatori tööseadmete nool ja muud elemendid on omavahel pöördeliselt ühendatud ja neid juhivad hüdrosilindrid. Teleskoopnoolega ekskavaatorite hulka kuuluvad ekskavaatorid, milles tööprotsessiga kaasneb noole pikendamine ja tagasitõmbamine.
Lisaks loetletud klassifitseerimisomadustele erinevad ekskavaatorid üksteisest disaini, otstarbe, suuruse ja võimsuse poolest. Ühe kopaga ekskavaatorid jagunevad sõltuvalt teostatava töö eesmärgist või liigist ehitus-, karjääri-, eemaldamis- ja eriotstarbelisteks.
Ehitus Kuni 4 m 3 mahutavusega kopaga ekskavaatorid on ette nähtud kaeve- ja peale- ja mahalaadimistöödeks.
Karjäär Ekskavaatorid on ette nähtud tööks maagi-, söe- ja muudes karjäärides.
Ülekoormamine Avatud kaevandustes ja suurtel ehitusplatsidel (karjäärides) kasutatakse 25–160 m 3 mahuga koppaga sirgeid ekskavaatoreid ja kõnnivaid tõmbeid.
Eriline ekskavaatorid (tunnel, turvas jne) on mõeldud kasutamiseks teatud kindlates tingimustes.
Meie riigis kehtiv ühekopaga ekskavaatorite indekseerimine (märgistamine) peegeldab nende põhiomadusi. Ekskavaatorite indekseerimine toimub masinate suurusgrupi alusel.
Ekskavaatorite suurusgrupi määravad masinate stabiilsus ja võime efektiivselt kasutada erineva võimsusega koppasid sobiva noole ulatuse, sügavuse või kaevekõrguse juures.
Koppa mahud on toodud ainult juhisena, nagu antud ekskavaatori puhul võivad need olenevalt arendatava pinnase kategooriast erineda kaks või enam korda.
Ühekopaga universaalsete ekskavaatorite indekseerimissüsteem annab järgmise indeksstruktuuri (joonis 6.1). Ekskavaatori indeks koosneb tähe- ja numbrirühmadest.
Täherühm "EO" tähendab ühe kopaga ekskavaatorit. Militaarekskavaatorite puhul on indeksi vasakpoolses täheosas täht B (EOV - ühe kopaga sõjaline ekskavaator).
Digirühm tähendab (nende paigutuse järjekorras): suurusgruppi; käiguosa tüüp; töövahendite teostamine; mudeli seerianumber.
Tähed (A, B, ...) pärast numbreid näitavad selle mudeli järgmist moderniseerimist, aga ka selle spetsiaalset kliimaversiooni (HL - põhjaosa; T - troopiline; TV - niiske troopika jaoks).
Näiteks indeks EO-4125ХЛ tähistab ühekopalist täispöörlevat universaalset ekskavaatorit, suurusgrupp IV (peakopa mahutavus 0,65 m 3), roomik-monteeritud, tööseadmete jäiga vedrustusega (hüdrauliline), mudel 5, põhjapoolne versioon.
Koos käsitletuga võib olla ka indekseerimine, mis sisaldab fikseeritud osa tüübi tähttähistust ja digitaalset rühma, mis näitab ekskavaatori kaalu. Näiteks indeks EK-17 tähistab ühe kopaga ekskavaatorit pneumaatilistel ratastel, mis kaaluvad 17 tonni.
Ekskavaatori klassifikatsioon
Ekskavaatorid on pinnase teisaldamismasinad, mis on ette nähtud pinnase kaevamiseks ja teisaldamiseks. Kõik ekskavaatorid on jagatud kahte suurde rühma: pidev töö – mitme kopaga ja perioodiline (tsükliline) tegevus – ühe kopaga.
Pidevad ekskavaatorid teostavad mõlemat toimingut – pinnase kaevamist ja teisaldamist – üheaegselt; Partiiekskavaatorid teostavad neid toiminguid järjestikku, katkestades pinnase liikumise ajal kaevamise. Seega on masina tööaeg, mille jooksul pinnast valitakse, pidevatel ekskavaatoritel pikem ja nende tootlikkus on suurem kui perioodiliste ekskavaatorite tootlikkus. Sellele vaatamata on laiemalt levinud ühe kopaga ekskavaatorid, mille eeliseks on nende mitmekülgsus, st võimalus kasutada nii kaevetöödel kui ka peale- ja mahalaadimistöödel ning mis tahes raskematel pinnastel, sealhulgas kivistel (koos eellõhkamisega), mullad . Mitme kopaga ekskavaatoreid kasutatakse peamiselt kaevikute kaevamiseks ja mittemetalliliste materjalide kaevandamiseks karjäärides homogeensetel pinnastel, millel puuduvad kivisulused.
Nii ühe- kui ka mitmekopalised ekskavaatorid on saadaval nii maismaal kui ka ujuvana.
Maaekskavaatoritel on roomik-, õhkrattad ja kõnni- (viimast kasutatakse ainult ühekopaga ekskavaatorites) jooksev varustus.
Ekskavaatori mehhanisme käitavad diisel-, karburaator-, auru- või elektrimootorid. Valdav enamus kaasaegsetest ekskavaatoritest on varustatud diisel- ja elektrimootoritega kui kõige ökonoomsemad. Karburaatormootoreid kasutatakse harvemini.
Mootori valiku määravad tingimused, milles ekskavaator töötab. Nii kasutatakse raudteede ja maanteede ehitamisel töötavatel ekskavaatoritel, st seal, kus masinat tuleb suhteliselt sageli ühest kohast teise transportida, diiselmootoreid. Pidevalt samas kohas töötavatel ekskavaatoritel, näiteks mittemetalliliste materjalide kaevandamise karjäärides, söekaevandustes jne, on kasulik kasutada elektrimootoreid, kuna elekter on odavaim energiaallikas. Lisaks on hooldus lihtsustatud ja puudub vajadus masinat pidevalt kütusega varustada.
Seetõttu paigaldatakse kuni 3 m3 mahutavusega kopaga ekskavaatoritele sageli diiselmootorid ja suurematele ekskavaatoritele elektrimootorid.
Kui ekskavaatori kõiki mehhanisme juhib üks mootor, nimetatakse sellist ajamit ühemootoriliseks ajamiks. Kui ekskavaatori iga mehhanismi (või mõnda mehhanismi) juhib eraldi mootor (tavaliselt elektriline), nimetatakse sellist ajamit mitme mootoriga ajamiks.
NSV Liidus valmistati ühemootorilise ajamiga ühe kopaga ekskavaatoreid koppadega, mille maht oli kuni 2,5-3 m3 ja välismaal - kuni 4-4,5 m3. Praegu valmistatakse ette ekskavaatorid tootmiseks
diisel-elektrilise mitmemootorilise ajamiga, millele on paigaldatud kopad mahuga 1,6 m3 (E-1602). Lisaks on alustatud mitme mootoriga hüdroajamiga ekskavaatorite tootmist, kus kasutatakse 0,25 m3 mahuga koppasid (E-2513 ja E-2514), ning hüdrauliliste ekskavaatorite tootmist kopaga, mille maht on 0,25 m3. Valmistamisel on 0,4-0,5 m3.
Mitmemootoriliste ajamite levik on eelkõige seletatav asjaoluga, et ekskavaatorimehhanismid on valmistatud eraldi sõlmedena, mida on lihtne masina kokkupaneku käigus paigaldada ja remondi käigus (agregaatremondi meetodil) välja vahetada. Lisaks võimaldab see disain erinevatel masinatel kasutada identseid või peaaegu identseid (ühtseid) komponente, mis võimaldab luua nende suuremahulist spetsialiseeritud tootmist ja vähendada varuosade valikut.
Mootorilt töömehhanismidele liikumise edastamiseks kasutatakse järgmist tüüpi ajamid:
– mehaaniline, kui liikumine toimub võllide, hammasrataste, tigupaaride, kettajamite abil;
– hüdrauliline mahuline, kus ajami rolli täidavad hüdropump (üks või mitu), õlitorud ja hüdromootorid (või hüdrosilindrid);
– vedelik ringleb õlitorustikes, edastades energia pumpadest hüdromootoritele (või hüdrosilindritele), mis panevad tööle töömehhanismid; see meetod põhineb vedeliku omadusel mitte kokku suruda;
– hüdrodünaamiline, kus energia edastamiseks kasutatakse turboühendusi või turbotrafosid; seda kasutatakse tavaliselt koos mehaanilisega mehhanismide sujuvaks tööks ja liikumiskiiruse automaatseks juhtimiseks sõltuvalt koormuse suurusest (koormuse suurenedes väheneb töömehhanismide liikumiskiirus ja vastupidi);
– elektriline, kasutatakse mitme mootoriga ekskavaatoritel koos mehaanilise ajamiga; see ajam võimaldab operaatoril soovi korral reguleerida ekskavaatori mehhanismide liikumiskiirust, muuta kiirust automaatselt sõltuvalt koormustest ja kombineerida ka tööliigutusi;
– segatud, mis koosneb kahte tüüpi ajamitest, näiteks mehaanilisest ja elektrilisest.
Mehaaniline ajam on kõige levinum, nii et selle olemasolu ekskavaatoril ei ole masina nimes mingil viisil märgitud, vaid tavaliselt on märgitud ainult mootori tüüp, näiteks diisel ühe kopaga ekskavaator koos kopaga. mahutavus 0,5 m3. Kui kasutatakse teist tüüpi ajamit, on see märgitud ekskavaatori nimes, näiteks diisel-elektriekskavaator, see tähendab diiseljõuseadmete ja elektriajamiga ekskavaator.
Kõik eelnev kehtib nii katkendlike (ühekopa) ekskavaatorite kui ka pideva (mitmekopaga) ekskavaatorite kohta.
Seega eristavad ekskavaatorid:
1) liikumisviisi järgi (ujuv ja maal);
2) jõuseadme tüübi järgi (diisel, karburaator, elektri- või aurumasin);
3) mootorite arvu järgi (ühemootoriline, mitmemootoriline);
4) ajami tüübi järgi (mehaaniline, hüdrauliline mahuline, hüdrodünaamiline, elektriline, sega);
5) maaekskavaatorite tööseadmete tüübi järgi (roomik, õhkratas).
Lisaks klassifikatsioonis loetletud omadustele eristuvad kõik ekskavaatorite rühmad väiksemate omadustega - suurus, võimsus, otstarve.
Ühekopalised ekskavaatorid jagunevad kasutusotstarbe järgi kolme põhirühma: – ehitus, kuni 3 m3 mahutavusega kopaga, mis on ette nähtud kaevetöödeks ning peale- ja mahalaadimistöödeks ehituses;
– karjäär, 2 kuni 8 m3 mahutavusega ämbritega, mis on ette nähtud tööks karjäärides maagi- ja söemaardlate, samuti kivimite arendamiseks;
– ülekoormus, üle 6 m3 mahutavusega ämbritega, mis on ette nähtud eelkõige mineraalide (kivisüsi, maagi) kihte katvate kivimite ülemiste kihtide arendamiseks (ülekoormus).
Ülekoormusekskavaatorid eristuvad pikliku töövarustuse poolest, mis võimaldab pinnast kaevamiskohast pika vahemaa tagant maha visata. Sellesse masinarühma kuuluvad ka võimsad kõndivad ekskavaatorid – draglainid, mida kasutatakse kaevandustöödel kivimi ülemiste kihtide kaevandatavasse ruumi viimiseks, aga ka suurtes hüdrotehnilistes ehitistes.
Ühe kopaga ekskavaatoreid tuleks eristada nende kasutamise poolest erinevat tüüpi tööseadmetega.
Universaalsed ekskavaatorid on masinad, millel on vähemalt nelja tüüpi vahetatavad tööseadmed. Ehitusekskavaatoreid toodetakse tavaliselt universaalsetena ning üht tüüpi tööseadmeid saab töö käigus asendada teisega.
Ekskavaatoreid, millel on ainult ühte tüüpi töövarustus, nimetatakse spetsiaalseteks. Reeglina toodetakse neid üle 6 m3 mahuga kopaga, kuid erilised võivad olla ka väiksema mahutavusega (näiteks maa-alused) kopaga ekskavaatorid.
Selles raamatus kirjeldatakse kodumaises tööstuses toodetud ühe kopaga ehitusekskavaatoreid, täis- ja osaliselt pöörlevaid.

Riis. 1. Ühekopaga ekskavaatori skeem:
1 - jooksev varustus, 2 - pöördlaud,
Ekskavaator on masin, mida kasutatakse mittetahkete või purustatud kivimite mehaaniliseks ekstraheerimiseks (joonis 2).
Koos kivimi osa eraldamisega massiivist viib ekskavaator kaevandatud kivi teatud kaugusele transpordile või puistangule, kui kaevandatud kivi visatakse kohapeal puistangusse (kaevude kaevamisel, savi ladustamisel koonustesse). või harjad).
Esimese ühe kopaga ekskavaatori ehitamine pärineb 1836. aastast. Veidi hiljem, 1860. aastal, projekteeriti mitme kopaga ekskavaator.
Revolutsioonieelsel Venemaal ilmus esimene ühe kopaga ekskavaator palju hiljem, 1900. aastal. Väike hulk selliseid ekskavaatoreid toodeti raudteeosakonna liivakarjääride arendamiseks. Sel ajal me veel mitme kopaga ekskavaatoreid üldse ei valmistanud.
Nõukogude Liidus arenes ekskavaatorite ehitamine võimsalt.
Vastavalt tegevusmeetodile ja tööseadme asukohale jagunevad ekskavaatorid järgmistesse põhiklassidesse: ühe kopaga, kaablitüüpi, mitme kopaga.
Töökorras liikumisviisi järgi jaotatakse need rööpa- ja roomikroomikutega ekskavaatoriteks.
Viimastel aastatel on raske masinatööstus hakanud tootma raskeveokite ühe kopaga ekskavaatoreid, mis liiguvad töökorras jalutusmehhanismi abil.
Jõgede, kanalite ja muude veekogude süvendamisel töötamiseks ehitatakse ka mitme kopaga ekskavaatoreid ujuvatena (nn. süvendajatena). Üks sellistest süvendusmasinatest on kullakaevandustööstuses kasutatavad tragid.

Riis. 2. Ühe kopaga roomikekskavaator.
Ekskavaatorid töötavad alalis- või vahelduvvoolu elektrimootoritel, aurumasinatel või sisepõlemismootoritel.
TO Kategooria: - Ekskavaatorite käitamine
Peamine populaarne masin, mida ehitusobjektidel kasutatakse kaevetöödel, puiste- ja tükkmaterjalide ümberlaadimisel ning muude tööde teostamisel, olenevalt paigaldatud lisavarustusest on kahtlemata ekskavaator. Lihtsus, töökindlus ja muljetavaldav mitmekülgsus võimaldavad sellel mängida domineerivat rolli peaaegu igal ehitusplatsil.
Esimesed ekskavaatorid ehitati Venemaal 19. sajandi üheksakümnendate alguses, endises Putilovi tehases. Kuni 1917. aastani toodeti umbes 50 masinat, millest umbes 40 olid raudtee ühekopaga ekskavaatorid ja 10 mitme kopaga. Ekskavaatorite seeriatootmise korraldamisel peeti otstarbekaks kehtestada mitmeid standardeid, sealhulgas masinate klassifikatsiooni ja parameetrite osas. Esimene selline standard (ühekopaga ekskavaatoritele) ilmus 1933. aastal ja kiideti pärast radikaalset läbivaatamist heaks standardi GOST 518-41 kujul.
Ekskavaatorid on pinnase kaevamiseks ja teisaldamiseks mõeldud pinnase teisaldusmasinad, mis on pinnase teisaldamise laadimis- ja mahalaadimismasinate põhiliik.
Mitme kopaga ekskavaatorid teostavad mõlemat toimingut – pinnase kaevamist ja teisaldamist – üheaegselt; ühe kopaga toimingud tehakse järjestikku, katkestades pinnase liikumise ajal kaevamise. Seega on mitme kopaga ekskavaatorite masina tööaeg, mille jooksul pinnas eemaldatakse, ja tootlikkus kõrgem kui ühekopaga ekskavaatoritel. Vaatamata sellele on ühekopaga ekskavaatorid oma mitmekülgsuse tõttu laiemalt levinud, s.t. võimalus neid kasutada nii kaevetöödel kui ka peale- ja mahalaadimistöödel kõige raskematel pinnastel, sh kivistel pinnastel (koos eellõhkamisega).
Ühekopaga ekskavaatorite klassifikatsioon
Seal on kolm peamist rühma:
ehitus-universaalne - kuni 3 m3 mahutavusega kopadega, mis on ette nähtud kaevetöödeks;
karjäär - 2 kuni 8 m3 mahuga ämbritega, mis on ette nähtud tööks karjäärides maagi- ja söemaardlate arendamiseks;
ülekoormus - üle 6 m3 mahuga ämbritega, mis on ette nähtud ülemiste kivimikihtide arendamiseks (ülekoormus).
Ühekopalised ekskavaatorid eristuvad nende kasutamise poolest erinevat tüüpi tööseadmetega.
Universaalsed ekskavaatorid on mõeldud töötama erinevat tüüpi vahetatavate seadmetega; sirge ja ekskavaator, draglain, konksu vedrustuse või haaratsiga kraanapoom, vaiavedaja jne.
Pooluniversaalsetel ekskavaatoritel on lisaks põhitööseadmetele ka ühte või kahte tüüpi vahetatavat lisavarustust (eeskäpp, ekskavaator, draglain).
Spetsiaalsetel võimsatel ekskavaatoritel on ainult ühte tüüpi varustus, näiteks sirge labidas.
Ühe kopaga universaalne ekskavaator on tsükliline masin, mis on ette nähtud pinnase ja muude materjalide väljakaevamiseks ja teisaldamiseks ühe kopaga ühte tüüpi töövahenditega ning laadimis-, vaiamis- ja muude tööde tegemiseks teist tüüpi vahetatavate töövahenditega.
Selle levinud ekskavaatorite klassi töötsükkel koosneb:
pinnase lõikamise (kaevamise) toimingud (samaaegse ämbri täitmisega),
täidetud ämbri viimine mahalaadimispunkti,
ämbrist pinnase mahalaadimine ja ämbri tagasi toomine näole.
Töötsükli kestus olenevalt ekskavaatori võimsusest ja tüübist ning töötingimustest jääb vahemikku 12 kuni 80 sekundit. Ühe kopaga ekskavaatori tootlikkus 1 m3 kopa võimsuse kohta, olenevalt töötingimustest, jääb vahemikku 100-350 tuh m3 aastas ehk 80-180 m3/h. Ühe kopaga ekskavaatoreid kasutatakse mis tahes, sealhulgas kõige tugevamate ja heterogeensemate suurte tahkete lisanditega pinnaste arendamiseks. Pehmematel muldadel töötamiseks saab ühe kopaga ekskavaatorid varustada suurema võimsusega kopadega. Enne kaevandamist kobestatakse kivid ja külmunud pinnas ühe kopaga ekskavaatoriga (tavaliselt plahvatuse teel)
Jooksuvarustuse tüübi järgi eristatakse roomik-, ratas-, kõnni- ja raudteed. - mobiilsed, ujuvad, ratastel roomikekskavaatorid ühe kopaga.
Ajami tüübi järgi - ühe mootoriga ning kõigi töömehhanismide sega- ja üksikajamiga.
Elektrijaama tüübi järgi - juhib sisepõlemismootor (diisel, harva karburaator ja gaasigeneraator), elektriline, hüdrauliline, pneumaatiline ja kombineeritud.
Juhtimise tüübi järgi - manuaalne, hüdrauliline, pneumaatiline, elektriline ja segatud.
Tööseadmete tüübi järgi jaotatakse ekskavaatorid ühekopalisteks, millel on jäik liigend-libisev ühendus kopa ja noole vahel (sirge labidas), jäiga liigendühendusega kopa ja noole vahel (ekskavaator) ning painduva ühendusega kopa ja noole vahel (dragline, haaratsi jne).
Kõige tavalisem varustus on sirge labidas; See on varustatud mis tahes võimsusega ekskavaatoritega, mille kopad mahutavad kuni 153 m3. Maavaramaardlate rajamisel ja süvendite kaevamisel, peamiselt kõvades, kivistes ja kivistes kivimites ja pinnases, samuti stabiilsetes pinnastes, on soovitav kasutada ekskavaatoreid, millel on sirge labidavarustus ja mahalaadimine sõidukitesse või prügimäele. kindlused Ekskavaatorseadmeid kasutatakse kitsaste kaevikute kaevamisel (laiused 0,7 - 1,5 m ja sügavused kuni 8 m), eriti vertikaalseintega kanalisatsioonivõrkude rajamiseks, naftatorustike rajamiseks, vundamendi rajamiseks kõvas ja kivises pinnases, samuti väikeste süvendite rajamiseks.
Draglainekskavaatori töövarustus koosneb noolest ja kopast, mis riputatakse tõste- ja veoköite abil noole külge. Tavaliselt kaevandab tõmbliin pinnast allapoole ekskavaatori taset; Koppaid kasutatakse erineva võimsusega - eelkobestatud kivimites on draglaini kasutamine lubatud üle 10 m3 kopa mahuga. Tsükliaeg on tavaliselt 10-20 rohkem kui sirge labidaga ekskavaatoriga töötamisel. Kuni 40 ühe kopaga ekskavaatorit töötavad koos draglainiseadmetega. Dragliinid nn kõndimisliigutusi nimetatakse kõndimisliigutusteks. Haaratsit kasutatakse laadimistöödel, järskude seintega süvendite kaevamisel ja töödel vee all. Adra varustus on kohandatud tasandustöödeks, teekatete eemaldamiseks jne. Teatud ekskavaatorite mudelid, mis on mõeldud peamiselt ehituseks (kuni 5 m3 mahutavusega kopad), on varustatud erinevate vahetatavate seadmetega mitte ainult kaevandamiseks, vaid ka paigaldamiseks, tõstmiseks ja transportimiseks, peale- ja mahalaadimiseks, vaiamiseks ja puurimiseks. , metsade raie ja kändude juurimine ja nii edasi. Selliseid ekskavaatoreid nimetatakse tavaliselt universaalseteks, kuna neid saab kasutada mitmesugustel kaeve- ja ehitustöödel. Kui vahetatavate seadmete ühikute arv ei ületa kolme (näiteks labidas, lohistik, kraana), nimetatakse ekskavaatorit pooluniversaalseks.
Levinud on hüdraulilise ajamiga ekskavaatorid, nn. hüdraulilised ekskavaatorid, milles igat tüüpi tööosad on pöördega ühendatud pöördlauaga ja neid liigutatakse kõrgsurvepumpadega (10–40 MPa) käitatavate hüdrosilindrite abil. Sel juhul kasutatakse pöörlemise edastamiseks (pöörlemisajam, sõit) tavaliselt hüdromootoreid. Seda tüüpi ühekopaga ekskavaatoreid valmistatakse väikese (kuni 1,8 m3), keskmise (2-3 m3) ja suure (3,2-6 m3) kopaga. Peamiseks töövahendiks on ekskavaator. Hüdrauliliste ekskavaatorite erivõimsus, olenevalt töötingimustest (pehme või kõva pinnas), jääb vahemikku 133–213 kW 1 m3 kopa mahu kohta.
Ühekopaekskavaatorid jagunevad olenevalt kasutusotstarbest ehitus-, karjääri-, ehitus-karjääri- ja ribaekskavaatoriteks, lisaks tunnel-, ujuv-ekskavaatorid jne.
Ehitusekskavaatorid on kõige levinum ühe kopaga ekskavaatorite tüüp: rohkem kui 80 riigis toodetakse umbes 200 mudelit. ja välismaa tehased. Seal on: universaalsed väikese võimsusega (kopa maht 0,05-1,8 m3, kraana tõstevõime 0,7-45 t, kaal 1,5-65 t); keskmise võimsusega - pooluniversaalne (kopa maht 2-3 m3, kraana tõstevõime 60-80 tonni, kaal 72-105 tonni); suure võimsusega - pooluniversaalne (kopa maht 3,25-6 m3, kraana tõstevõime 100-150 tonni, kaal 115-210 tonni). Erikaal kõva pinnase kopa mahu 1 m3 kohta on nendel ekskavaatoritel 33-36 tonni Väikese võimsusega ekskavaatoritel on sageli vahetatavad roomik- ja pneumoratastega tööseadmed ning ühemootoriline ajam.
Hüdraulilised ekskavaatorid on individuaalse või segaajamiga. Karjääri ekskavaatorid valmistatakse labidaseadmetega, harvemini vahetatavate draglaini- ja kraanaseadmetega. Neid eristavad võimsad töövahendid, suured tööjõud ja kiirused ning lühike töötsükkel, mis võrreldes teiste sama suurusega ekskavaatoritega tagab suurema tootlikkuse sõidukitesse laadimisel, eriti kõvadel pinnastel. Keskmise (kobamaht 2-4 m3) ja suure võimsusega (kobamaht 5-20 m3) ekskavaatorid kaaluga 76-900 tonni on mõeldud tööks karjäärides, eriti kõvades, eellõhkatud kivimites ja pinnases laadimisega peamiselt rasketesse - kallurid. Neid toodetakse nii pooluniversaalsete ekskavaatoritena kui ka spetsiaalsetena. standardse ja laiendatud varustusega labidad pealispinna serval asuvatesse sõidukitesse laadimiseks (kaevetööd). Jooksuvarustus - röövik. Jõuseadmed on elektrilised, üksikute ajamimehhanismidega, kasutades generaator-mootori süsteemi. Ajamimootori erivõimsus on 60 - 80 kW 1 m3 kopa mahu kohta, maapinna rõhk on 0,15-0,25 MPa, sõidukiirus 0,6-1,5 km/h. Hüdraulilised kaevandusekskavaatorid on kopa mahutavusega kuni 8-9 m3, väljatöötamisel on mudelid kopaga mahutavusega 12-20 m3.
Keskmise ja suure võimsusega ehitus- ja karjääriekskavaatorid on mõeldud töötama peamiselt mittemetallist ehitusmaterjalide karjäärides. Oma disaini poolest on need ehitus- ja karjääride vahel keskmisel positsioonil. Katteekskavaatorid on tavaliselt valmistatud labidaseadmetega, et viia kivid karjäärides asuvasse puistangusse. Kaevandatava pinna serval asuvatesse sõidukitesse laadimiseks kasutatakse ka kuni 15 m3 mahutavusega koppaga ekskavaatoreid. Ekskavaatori kopa maht on 6-153 m3, kaal 700-12 700 tonni Võimsate mudelite jooksuvarustus on 4 kaksikroomiku. Jõuseadmed on samad, mis kaevandusekskavaatoritel. Erikaal 45-90 tonni 1 m3 kopa mahutavuse kohta, sõidukiirus 0,3-0,5 km/h. Lisaks mehaanilisele labidale kasutatakse eemaldamisel kuni 100 m pikkuste poomidega jalutusraudteid, mille ämbrid mahutavad 5–168 m3 ja kaaluvad kuni 14 tuhat tonni. Need on peamised seadmed mittetranspordisüsteemidele. maavarade maardlate arendamine.
Tunneli- ja kaevandusekskavaatoreid kasutatakse maa all suure ristlõikega töödel tunnelite kaevamisel, maa-aluste ehitiste kambrite ehitamisel ja mineraalide kaevandamisel. Kopa maht 0,75-1 m3, kaal 16-30 tonni.
Ekskavaatorid - eesmärk ja klassifikatsioon
Ekskavaatorid (nimi pärineb ladinakeelsetest sõnadest "ex" ja caveo, mis tähendab "kaevaja") eristuvad nende suure lõdvestamisvõime poolest. Nende transpordivõime on väike ja selle määrab nende masinate tegevusulatus. Ekskavaatorid jagunevad otstarbe ja võimsuse järgi mitmesse rühma. Kui masin sooritab kõiki toiminguid kindlas järjekorras, korrates neid teatud ajavahemike järel, liigitatakse see katkendlikuks (tsükliliseks) masinaks, kui ta teeb kõiki toiminguid üheaegselt, siis on tegemist pideva masinaga. Vahelduva ekskavaatorite hulka kuuluvad ühe kopaga ekskavaatorid ja pidevate ekskavaatorite hulka mitme kopaga, kaabitsa- ja freesekskavaatorid.
Ühe- ja mitmekopalised ekskavaatorid on kas maismaal töötavad või ujuvad. Maaekskavaatoritel on roomik-, pneumoratas, siini- ja kõnnisõiduk.
Kõiki ekskavaatori mehhanisme käitavad diisel-, karburaator-, auru- või elektrimootorid. Kõige ökonoomsemad on diisel- ja elektrimootorid. Mootori valiku määravad tingimused, milles ekskavaator töötab. Seega on karjääris töötavatel ekskavaatoritel kasulik kasutada elektrimootoreid, kuna elekter on odavaim energiaallikas ning teedeehitusel töötamisel, kus masinat sageli ühest kohast teise transporditakse, on soovitatav kasutada diislit. mootorid.
Kui ekskavaatori kõiki mehhanisme juhib üks mootor, nimetatakse sellist ajamit ühemootoriliseks ajamiks. Kui ekskavaatoris juhib iga mehhanismi (või mehhanismide rühma) eraldi mootor, nimetatakse sellist ajamit mitme mootoriga ajamiks.
Liikumise ülekandmiseks mootorilt töömehhanismidele kasutatakse järgmisi ajamitüüpe: – mehaanilised, kui liikumist edastatakse võllide, hammasrataste, tigupaaride, kettajamite abil; – hüdrauliline mahuline, kus ajami rolli täidavad hüdropump, õlitorud ja hüdromootorid (või hüdrosilindrid); vedelik ringleb õlitorustikes, edastades energia pumpadest hüdromootoritele (või hüdrosilindritele), mis panevad tööle töömehhanismid; – hüdromehaaniline, milles energia edastamiseks kasutatakse pöördemomendi muundurit koos mehaanilise jõuülekandega; – elektriline, kasutatakse mitme mootoriga ekskavaatoritel koos mehaanilise ajamiga; – segatud, mis koosneb kahte tüüpi ajamitest, näiteks mehaanilisest ja elektrilisest.
Seega liigitatakse ekskavaatoreid: – liikumisviisi järgi (ujuv ja maa); - jõuseadmete tüübi järgi (diisel, karburaator, elektriline, diisel-elektriline jne); – mootorite arvu järgi (ühemootoriline, mitmemootoriline); – ajami tüübi järgi (mehaaniline, hüdrauliline, hüdromehaaniline, elektriline); – vastavalt maaekskavaatorite käiguosa tüübile (roomikutega, pneumaatilised, rööbastele paigaldatavad ja kõndimisvarustusega).
Iga ekskavaatorite rühm eristub väiksemate omadustega - suurus, võimsus, otstarve.
Ühekopalised ekskavaatorid liigitatakse otstarbe järgi.
Põhigruppe on kolm: – ehitus-universaalne - kuni 3 m3 mahutavusega koppadega, mõeldud kaevetöödeks; – karjäär – 2 kuni 8 m3 mahuga ämbritega, mis on ette nähtud tööks karjäärides maagi- ja söemaardlate arendamiseks; – ülekoormus - üle 6 m3 mahuga ämbritega, mis on ette nähtud kivimite ülemiste kihtide arendamiseks (ülekoormus).
Ühekopalised ekskavaatorid eristuvad nende kasutamise poolest erinevat tüüpi tööseadmetega.
Universaalsed ekskavaatorid on mõeldud töötama erinevat tüüpi vahetatavate seadmetega; sirge ja ekskavaator, draglain, konksu vedrustuse või haaratsiga kraanapoom, vaiavedaja jne.
Pooluniversaalsetel ekskavaatoritel on lisaks põhitööseadmetele ka ühte või kahte tüüpi vahetatavat lisavarustust (eeskäpp, ekskavaator, draglain).
Spetsiaalsetel võimsatel ekskavaatoritel on ainult ühte tüüpi varustus, näiteks sirge labidas.
Ühekopalised ekskavaatorid. Ühe kopaga universaalne ekskavaator on tsükliline masin, mis on ette nähtud pinnase ja muude materjalide väljakaevamiseks ja teisaldamiseks ühe kopaga ühte tüüpi töövahenditega ning laadimis-, vaiamis- ja muude tööde tegemiseks teist tüüpi vahetatavate töövahenditega.
Ühe kopaga ekskavaatorid (joonis 72) koosnevad järgmistest põhikomponentidest: veermik, pöörlev platvorm koos jõuseadmete ja peamiste kinemaatiliste lülidega ning tööseadmed.
Roomikveermik tagab suure maastikusõiduvõime ja hea stabiilsuse ekskavaatori töö ajal.
Viimastel aastatel on märkimisväärselt suurenenud pneumaatilistel ratastel väikese kopa mahuga ekskavaatorite tootmine, millel on suur liikuvus ja manööverdusvõime masina teisaldamisel ühelt objektilt teisele. Pehmel pinnasel töötamisel kasutatakse laiendatud (või pikliku) roomiktehnikat, mille olemasolu vähendab erisurvet maapinnale ja parandab ekskavaatori manööverdusvõimet.

Riis. 72. Ühekopaga ekskavaatori skeem

Riis. 74. Sirge labida tööskeem
Pöördalus on toestatud läbi rullide või spetsiaalse (kuuli või rulliga) pöördseadme jooksuseadme raamil. Platvorm pöörleb šassii suhtes horisontaaltasandil.
Jooksva varustuse pöördenurk horisontaaltasapinnas määrab, kas ekskavaator võib olla täis- või osaliselt pöörlev. Täispöörleva ekskavaatori pöörlev osa võib pöörata ümber oma telje 360°.
Nendel masinatel on kõik jõuallikad, juhtpaneelid, töömehhanismid monteeritud pöörlevale platvormile ning kinnitatud töövahendid.
Töövarustus sisaldab ekskavaatori komponentide komplekti koos töövahendiga (kopp, konks, haarats jne). Pinnas arendatakse kopaga ja viiakse seejärel mahalaadimiskohta prügimäele või sõidukisse. Olenevalt vahetatava varustuse tüübist kasutatakse töökorpuse jäika või painduvat vedrustust. Töö iseloomu määravad töövahendid: esilabidas, ekskavaator, draglain, kraana või haarats.
Ekskavaatori töötsükkel viiakse läbi järgmises järjestuses: pinnase kaevamine; mullaga täidetud ämbri viimine mahalaadimiskohta; pinnase mahalaadimine ämbrist prügimäele või transpordiseadmesse; ämbri liigutamine (platvormi pööramine) näole; kopa langetamine järgmiseks kaevamisoperatsiooniks valmistudes.
Ühe kopaga universaalsete ekskavaatorite indekseerimissüsteem. Masina indekseerimissüsteem on põhimõte, mis on integreeritud indeksi (brändi) struktuuri, mis tähistab konkreetset ekskavaatorit ja kajastab selle peamisi omadusi. 1968. aastal võeti meie riigis kasutusele uus ühekopaga universaalsete ekskavaatorite indekseerimissüsteem. Ekskavaatori indeksil on neli peamist numbrit, mis näitavad vastavalt: masina suurusgruppi, käiguosa tüüpi, tööseadme konstruktsiooni ja seda tüüpi mudeli seerianumbrit. Seega sisaldab ekskavaatori indeks teavet selle peamiste omaduste kohta. Seega on EO-3313 BTV universaalne ühe kopaga ekskavaator, 3. suurusrühm, pneumaatilisel ratastel käitamisseadmel, tööseadmete trossvedrustusega, 3. mudel, mis on läbinud teise moderniseerimise, mõeldud töötamiseks niiskes troopikas. .
Sirge labidas on seade, mis on ette nähtud pinnase arendamiseks ekskavaatori parkimistasapinnast kõrgemal. Mehaanilise ajamiga sirge labidas (joonis 74) koosneb järgmistest põhikomponentidest: poomi tõsteköis, kopp, käepide, poom, sadulalaager. Käepide on noole külge kinnitatud sadulalaagriga, mille abil käepide pöörleb noole suhtes vertikaaltasandil ja teeb edasi-tagasi liikumist mööda käepideme telge. Pinnase kaevamisel peab kopp läbima positsioonid -IV, mis on näidatud joonisel fig. 74. Kopp tõstetakse tõstetrossi abil, mis käib ümber peaplokkide. Käepideme survet teostab survemehhanism, mis teostab ka käepideme tagurpidi liikumist (tagasi). Universaalsed ehitusekskavaatorid kasutavad trossi ja hammaslati ning hammasratta (surve) mehhanisme.
Survemehhanismid jagunevad sõltumatuteks, sõltuvateks, kombineeritud Survemehhanismiks nimetatakse sõltumatut, kui survejõudu on võimalik suurendada või vähendada sõltumata kopa tõstetrossi jõu suurusest, s.t kui käepideme surveliikumine koos kopa tõstetrossiga. kopp on valmistatud sõltumata kopa tõstmisest. Kui survejõu suurus sõltub kopa tõste/palju trossi jõu suurusest ja rõhku on võimalik ainult alandada, nimetatakse sellist survemehhanismi sõltuvaks.
Survemehhanismi nimetatakse kombineerituks, kui survejõu suurus sõltub tõstetrossi jõust, kuid kui survemehhanismi sõltumatu osa on sisse lülitatud, saab seda soovi korral suurendada.
Sirge labidakopp koosneb korpusest, poldiga hingedega põhjast ja vahetatavatest hammastest. Hammastel on otsa poole kitsenev vars, mis sobib visiiri pessa. Hambaid hoiavad pesas tihvtid, et vältida nende väljakukkumist.
Viimastel aastatel on sirged labidad varustatud poolringikujulise esiseinaga ämbrite ja ilma hammasteta kulbikujulise visiiriga. Sellise disainiga kopp on palju kergem ja sellel on kaevamisel minimaalne takistus, mis loomulikult suurendab ekskavaatori tootlikkust.
Sirgetel labidaekskavaatoritel kasutatakse kahte tüüpi käepidemeid: ühetala (sisemine tüüp) ja topelttala (välimine tüüp). Ühe tala õlg jookseb noole sees, kahetalaline aga väljast. Käepide võib teha survevõlli sadula juhikutes edasi-tagasi liikumist ja pöörata ka koos sadula laagriga survevõlli suhtes vertikaalsel tasapinnal. Käepideme konstruktsioon määrab survemehhanismi konstruktsiooni. NSV Liidus toodetud ekskavaatorites kasutatakse ühe tala käepidemega trossi survemehhanismi ja kahe tala käepidemega põrk-survemehhanismi.
Sirge labida nool on valmistatud terasplekist keevitatud konstruktsioonina. Käepideme tüüp määrab noole kujunduse. Poom võib olla kahetalaline ühetala käepidemega ja ühetalaline kahetalalise käepidemega.
Poomi ülemises osas on laagritele paigaldatud plokid, millest kulgevad läbi kopa tõstetross ja noole tõstetross. Poomi alumine ots (viies) on sõrmedega kinnitatud pöördaluse külge ja seda saab pöörata, kui selle kaldenurk muutub. Poomi keskosas on survevõll.
Ekskavaator on seade, mis on ette nähtud pinnase arendamiseks allapoole ekskavaatori parkimistaset süvendite, kaevikute ja kaevetööde ajal.
Ekskavaator (joonis 75) koosneb kopast, noolest, käepidemest ja kahe jalaga alusest. Kopp kinnitatakse jäigalt käepideme külge, mis on pööratavalt ühendatud noole ülemise otsaga. Trossi tõmbamisel pöörleb käepide vastupäeva, kopp põrkab vastu maad (asend /; asendid // ja /// vastavad transpordiasendile ja pinnase kopast mahalaadimisele).

Riis. 75. Ekskavaatori tööskeem:
Kopa abil pinnase kaevamise protsess. Kaevetööde kogutakistus R0 ületatakse kopa trajektoorile tangentsiaalselt suunatud aktiivjõu W0 abil, mida saab lagundada kopa lõikeservale tangentsiaalselt suunatud lõike- ja pinnase nihkejõuks WVi ning kopa lõikeservale tangentsiaalselt suunatud tõukejõu WB abil. ämbri lõikeserv.
Hüdrauliliste ühekopaga ekskavaatorite peamised parameetrid on: kopa maht q, ekskavaatori kaal C, mootori võimsus N, ekskavaatori töömõõtmed, samuti surve ja pumba jõudlus.
Ekskavaatorite hüdraulilistel ajamitel kasutatakse konstantse võimsusega hammasratta- ja laba tüüpi pumpasid (rõhuga 12-16 MPa) ja kolbpumpasid rõhuga kuni 30 MPa, samuti muutuva võimsusega, peamiselt aksiaalkolbpumpasid.
Pideva jõudlusega pumbad on disainilt lihtsad, kuid ei taga mootori võimsuse täielikku ärakasutamist kõigil režiimidel. Muutuva töömahuga pumbad tagavad ekskavaatorite tõhusama ja stabiilsema töö.
Ühekopaga ekskavaatorite jõudlus- ja tehnoloogilised skeemid. Ühekopaga ekskavaatorite tootlikkuse määravad paljud tegurid: masina konstruktsioon, kaevetööde organiseerituse tase, pinnase ja näo seisukord ja kvaliteet, operaatori kvalifikatsioon ja masina tehniline seisukord.
Joonisel fig. 77, b on kujutatud draivi töö skeem reservist aluspõhja muldkeha ehitamisel. Pinnase kaevamine toimub kahel haaratsil; ühel neist valatakse välja ja tasandatakse buldooseriga järgmine mullakiht, teisel aga tihendatakse äsjavalatud pinnas pinnase tihendusmasinatega.
Mitme kopaga ekskavaatorid. Mitme kopaga ekskavaatorid on mullatöömasinad, millel on töövahendiks mitme kopaga kett või pöörlev ratas, mille kopad on jäigalt ümber perimeetri kinnitatud. Neid kasutatakse: tee-ehitustöödel; süvendite, kanalite ja kaevikute kaevamisel torude või vundamentide paigaldamiseks paigaldatakse käiguraamile paigaldus, juhtpaneel, käigukast ja tööelement.
Märge. Ekskavaatorid EO-1621 (E-153A), EO-1627 (E-1514) on lisaks varustatud buldooseri varustusega: tera laius 2000 mm, kõrgus 680 mm, lõikesügavus 500 mm. EO-ZZPB (E-302) ekskavaatorid on varustatud draglainiseadmetega järgmiste parameetritega: noole pikkus 7500 mm, noolenurk 40°, lõikesügavus 4450 mm, lõikeraadius 6500 ja 10 100 mm, mahalaadimiskõrgus vastavalt 3900 ja 6300 mm , rad s mahalaadimine vastavalt 6390 ja 8300 mm.